I’m fully in agreement that more motors allows for a more complex game, but there are a lot of issues with adding more motors . One is that its just too much power for a vrc robot to play with. Things are easy enough with 8 motors, imagine if we had 10 or even 12. All innovative and interesting motor sharing mechanisms and clever ways to make subsystems with multiple uses would be completely irrelevant, you could just slap on a motor to any subsystem and call it a day.
Also what would most likely happen if you raised the motor limit is that teams would just add more motors to their drive. 4 motors for scoring mechanisms is enough to play pretty much any game, so adding more motors would just make drives even stronger. I really don’t think they need to be stronger.
Another concern is that v5 motors are expensive. if you upped the motor limit to 10 or 12, that generally adds more cost for a competition robot, which isn’t something vrc really needs. Also more complex games mean higher costs for fields.
anyways, given the rough estimations made on next years game peices (light, cheap, probably small) I doubt it will take much power to manipulate them.
Another thing to add is that if you add too many motors, you can’t control them all at once. The current from the battery is limited, meaning that having all these extra motors won’t really increase the strength of robots, and will just make distributing power more easily
Hmm not quite. Just take a look at Vex U for example. We have access too as many motors as we want and custom parts yet the best high school teams are probably better than most Vex U teams. And yeah, college students aren’t necessarily prioritizing robotics when they have to deal with more intense work loads, but I would still argue that more motors isn’t always a good thing. Usually the simpler and most efficient designs work best and those designs tend to arise with limited power output (and I blame murphy for that).
Though, it’d be interesting to give the best high school teams in the world access to more motors. I’m probably significantly underestimating how creative and innovative people can be when they have a lot more time to work with.
I think the fact that vexu teams aren’t able to use their unlimited motors to be more competitive than vrc teams proves the point that 8 v5 motors is enough. If adding more motors doesn’t make robots more competitive, then why add more motors?
(of course vrc teams tend to be more dedicated than vexu teams so there is that to consider, but still I think my point stands)
Well the upper subsystems don’t usually benefit much from more motors, but the drivetrain sure does. No way a HS bot can play defense against an 8m drive. If only Vex increased the motor limit just so the drive trains don’t burn out as quickly and more testing can be done with less breaks in between waiting for the motors to cool down
this is definitely true, although I think giving teams enough motors to have a 6-8 motor drive regularly wouldn’t necessarily be a good thing. it means teams have to worry less about having high build quality and a balanced gear ratio on their drive, and worry more about driving skill. not a direction that I think is good for vrc.
I wouldn’t mind a 1 or maybe 2 motor increase, but I think more than that would probably be harmful to vrc as a whole.
I would actually like more pneumatics than more motors. Just looking at the creativity lots of teams used with them with the cortex system, and how VEXU teams like Bison1 used them for their intakes to make sure they didn’t interfere with stacking, and how SJTU used them for their actuating intakes this season, I would love to see better pneumatic rules, since no one seems to use them.
This 1000%, it never made sense for pneumatics to cost two full V5 motors or at this point in the case of cortex any motors. I really hope that the rules change in the future to allow more VRC teams to experiment with them. Its such a simple rule change for the motor penalty to be decreased or removed that its honestly confusing as to why it hasnt happened.
As for the new 5.5W motors I hope that they are put on the site to buy separately soon.
I think it made sense to give up two motors for Cortex. I’m not sure what the pneumatic’s power output is but it would make sense that you give up the equivalent net power output in terms of motor power should you use pneumatics. That way, all that’s changing is the way the energy is transferred.
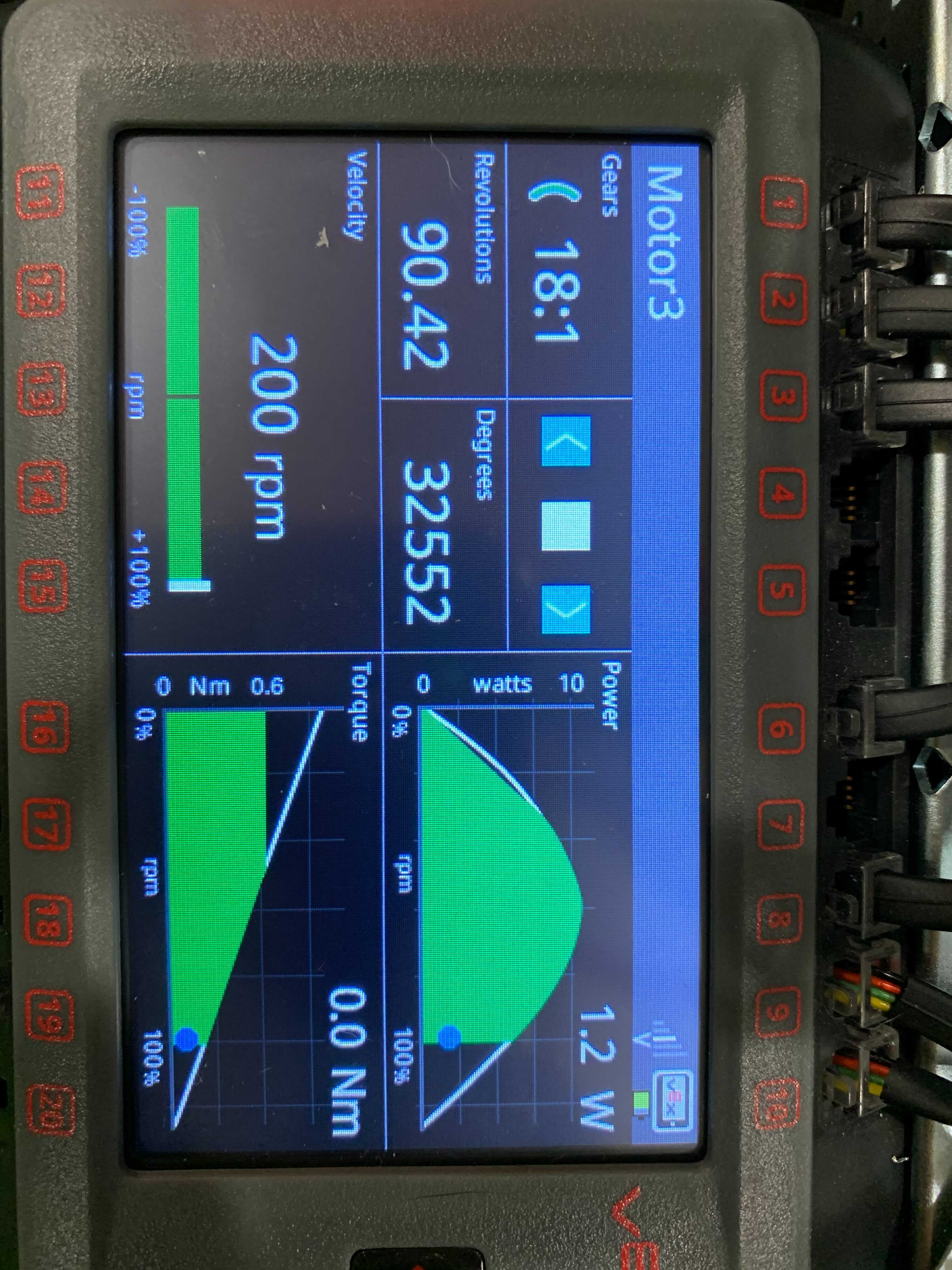
This might be documented somewhere but I’m failing to find it. does anyone know what the output rpm of these motors are? I’m assuming either 100 rpm or 200 rpm.
Would it be possible to test the motor RPM with full voltage applied? (The menu sets speed of the motor to 200 RPM with speed PID. I am wondering if you can set a voltage instead and see what the true RPM capability is)
I am wondering how it will compare to the V5 motor when the speed cap is removed from the speed PID’s dismissal. It may potentially have better efficiency in certain aspects than the regular V5 motor in regards to power/weight distribution.
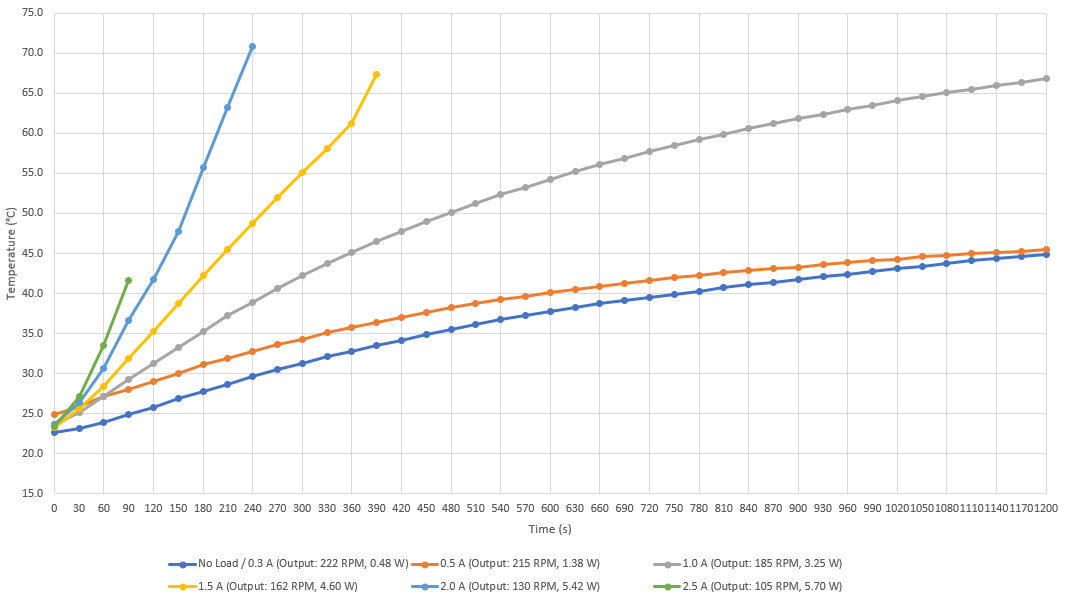
As long as you guys aren’t looking to run this motor at >1.5 Amp continuously until your battery is dead, you probably won’t run into the temperature limits of the new V5 Smart Motor (5.5 W).
We start cutting off the motor performance near 60°C to ensure we do not surpass the glass transition temperature of the plastic motor housing (e.g. where the motor housing can start getting permanent deformation issues due to heat distortion). Even at 5.5 Watts of software limited output, you can pull this for about two minutes continuously until you start running into the temperature cutoff.
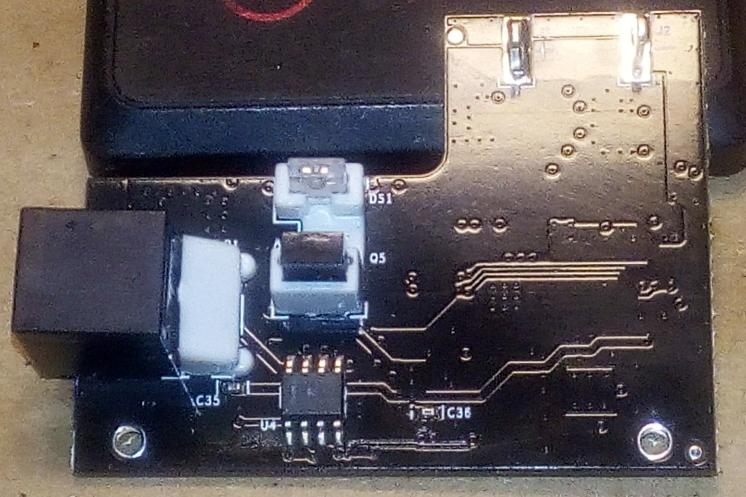
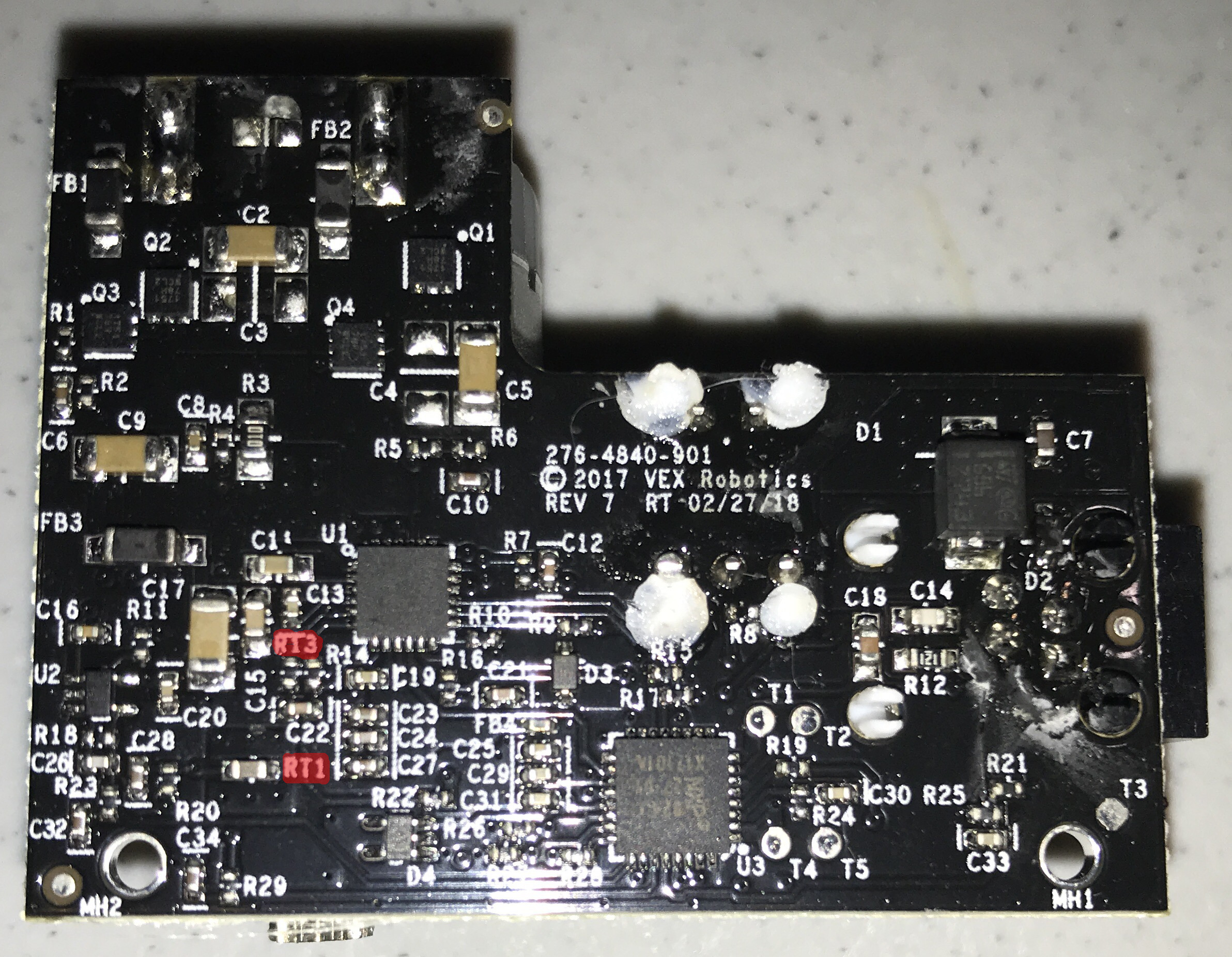
Unlike the prior V5 Smart Motor (11 W), in the 5.5 W motor we had a temperature sensor adhered directly onto the motor itself. This allows us to run the motor as long as possible until we hit a temperature threshold that may cause permanent issues.
Is it possible to have a rev 2 for the original hardware to add similarly accurate temperature monitoring and, perhaps, some additional ESD protection with TVS arrays or zener diodes?
@Art_Dutra_IV@jpearman Can either of you elaborate on what effect these new smaller motors will have on the dynamic current cap in VEXos? Will they only impact the current cap half as much as a large motor would; could you run 16 of these smaller motors at their full current cap?