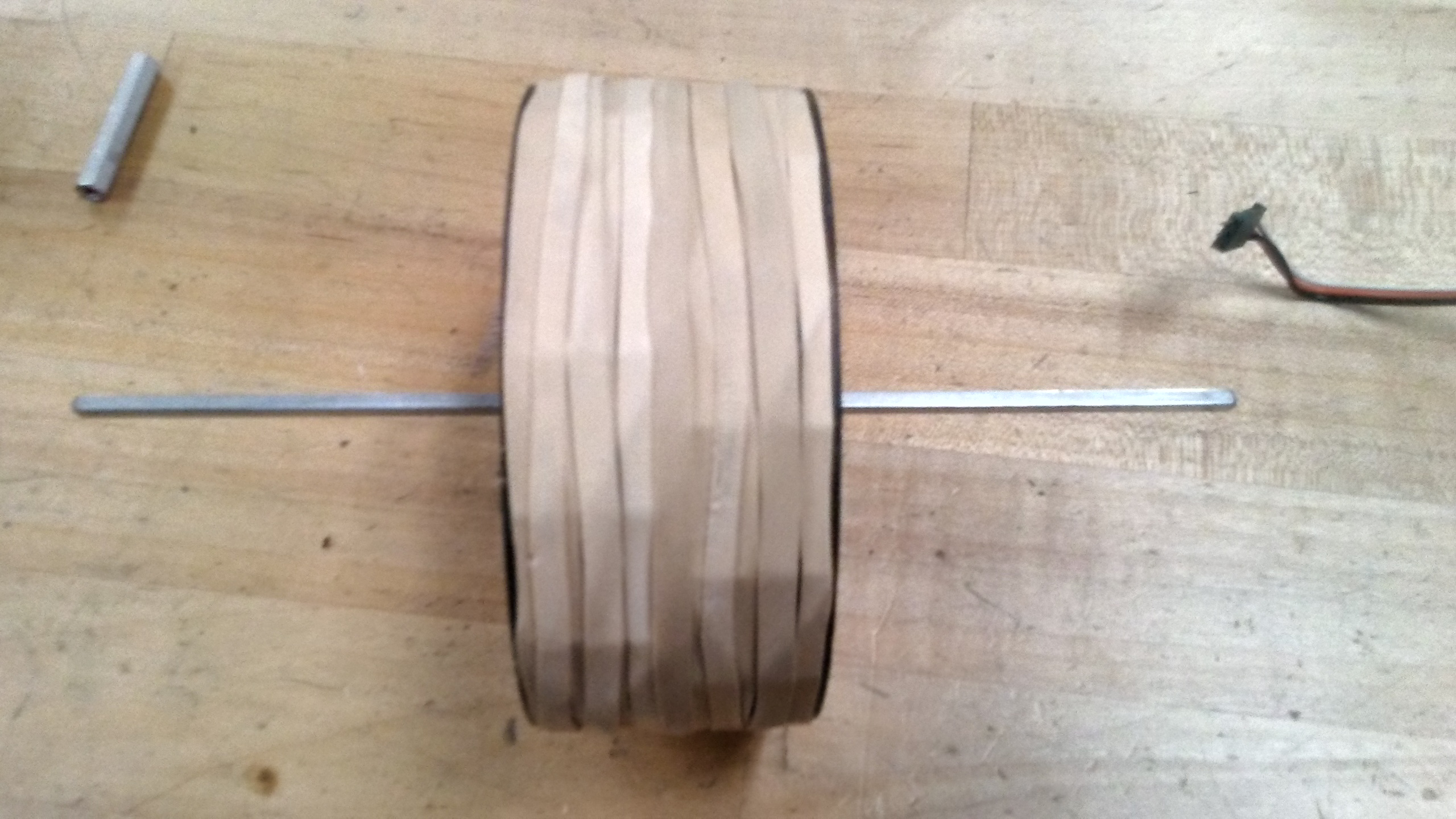
I think you should try single flywheel designs. I will send a picture of a very simplistic flywheel design that can be used in the future ![]()
I think catapults have been very successful, however one drawback is increased range and altering the trajectory. With a flywheel it is rather easy to change the rpms and go from shooting the middle to top flag or vice versa.
If you are going to do a catapult that is still a very good idea, yet a 393 flywheel requires at least 3 motors so do some testing before deciding between v5 and 393.
If anyone has any suggestions on shroud or hood materials I would really appreciate it.
I’ve never actually built a competitive flywheel, but I’ve seen antislip, lexan, and foam for hoods.
The first thing I would do is make your gear box then add the flywheel to that, what I usually do is build my gearbox and flywheel housing as one unit then mount it onto my robot.
This is probably a good idea. Just be sure you can mount it really well. I’ve made the mistake of building parts too compact and leaving nowhere to attach them. Just make sure there is as little flex as possible in the system. That is why build quality is so important in flywheels over punchers or even catapults. When something is moving at ~4000 rpm, the smallest flaw is amplified. A wobbly flywheel is no good.
I start with my drive and flywheel and build around that, rather than trying to fit that into whatever I already had build