Over the course of the year there has been one “meta” design for unloading towers. @Herosquid2392a has a picture of what is called a “Little Will” mechanism, the first iteration of this. Here’s an example:
https://youtube.com/shorts/R7I-DCSrMYM?si=IwVGiek2e349cGEp (video)
There are usually one or two standoffs facing the front. When you push the “Little Will” into the matchload tube, these serve as a ramp to push the balls up, so the rest of the mechanism can slide below the balls. Once the mechanism is pushed in enough, the balls begin to slide down the other two standoffs facing the robot and into the intake.
This “meta” design evolved into a much simpler piece of polycarb (or metal plate if you don’t have any polycarb) that pivots. Here’s an example below:
https://www.youtube.com/shorts/aE48uVphZ2o (another video)
The polycarb is attached to a high strength shaft using HS pillow block bearings (since a low strength shaft would easily warp), and rubber bands hold it in a sort of “ramp” or flat position. The key here is to have the edge of the polycarb above the lip of the matchload tube, but low enough to slide under the lower slanted surface of a block (you can’t have it too high and hit the flat side of a block, or it’ll get stuck).
When the robot pushes into the matchload tube, the low polycarb slides underneath the lowest block, lifting the whole stack up. As the mechanism gets pushed further into the tube, the polycarb starts to follow the curve of the tube opening, slanting towards the robot. This creates a ramp that funnels the blocks into the intake.
Overall, just my preference as someone who used both, I prefer the newer polycarb one. Little Will ones require a lot more accuracy when lining up with the tube, and require a lot more tuning. And since they’re mounted on a series of standoff braces, if you don’t use loctite on the braces (like me since my organization doesn’t have much), they will spin loose and out of alignment. Polycarb matchload mechanisms are much, much easier to build, tune, and maintain.
However, both these mechanisms probably won’t work with your robot. As you can see from both videos, robots that use these have spinning intakes that can usually hold or at least move a large amount of blocks without needing to move the drivetrain. Since you’re a clawbot, you don’t have that capability. With your robot, the blocks will just get jammed against the front of your robot. If you’re lucky you’ll probably get about 3 at a time.
As a clawbot, no offense, but I’d say you have a lot more, bigger problems that need your attention than a matchloader mech. Try building a hero bot, or replacing the claw with some sort of spinning intake system on your robot so you can hold/move blocks easier.
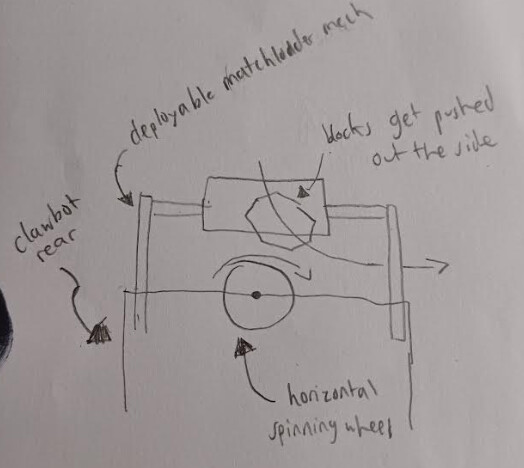
If you are adamant that about keeping your clawbot (which I definitely don’t recommend), you can try to mount one of these to the back of your robot, and use some sort of horizontal wheel to fling them to the side as they come out (rough idea diagram below). I assume this is for skills, so with some testing and improvements it should serve as a band-aid for your lack of a true intake while still unloading tubes.