Hello,
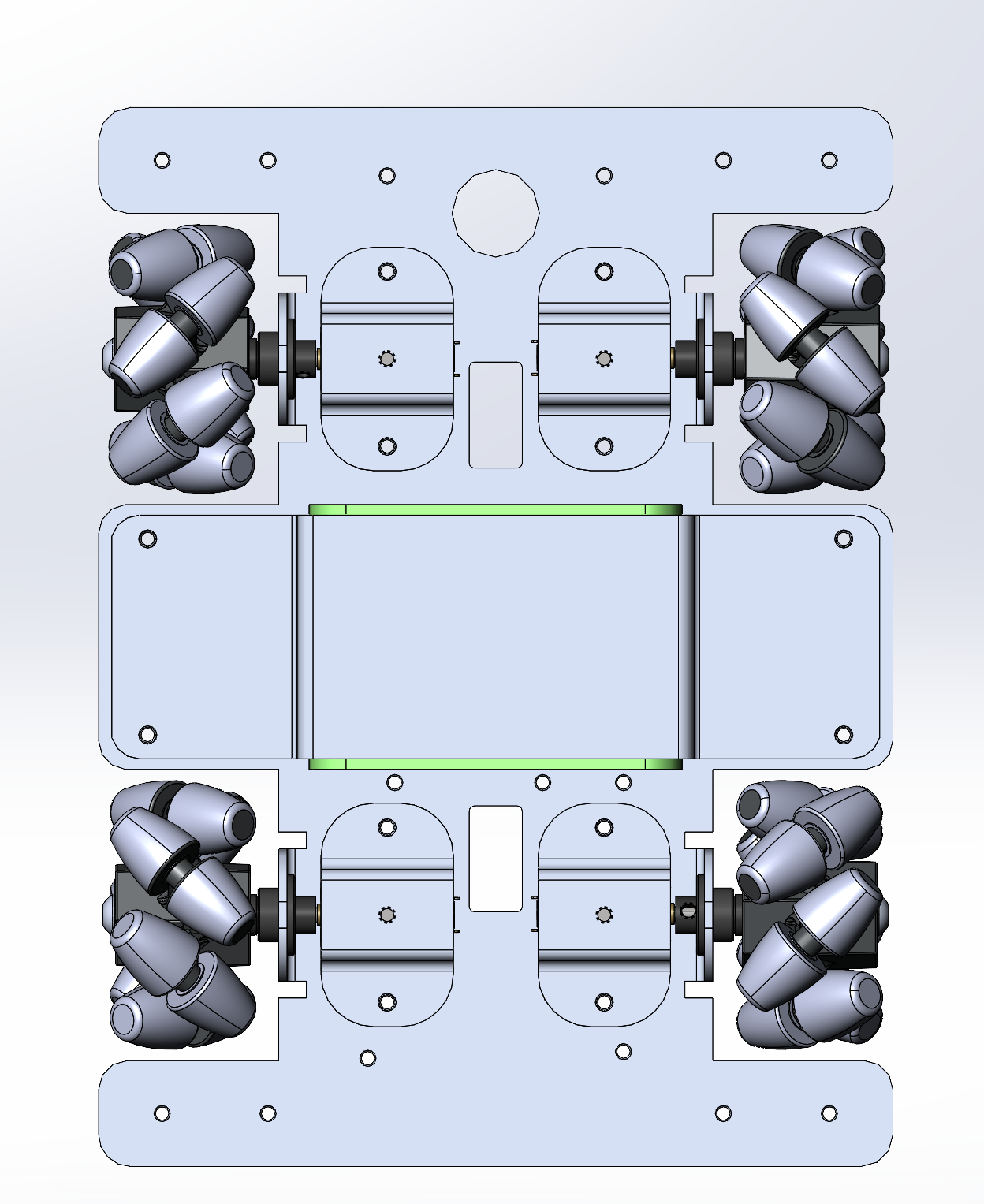
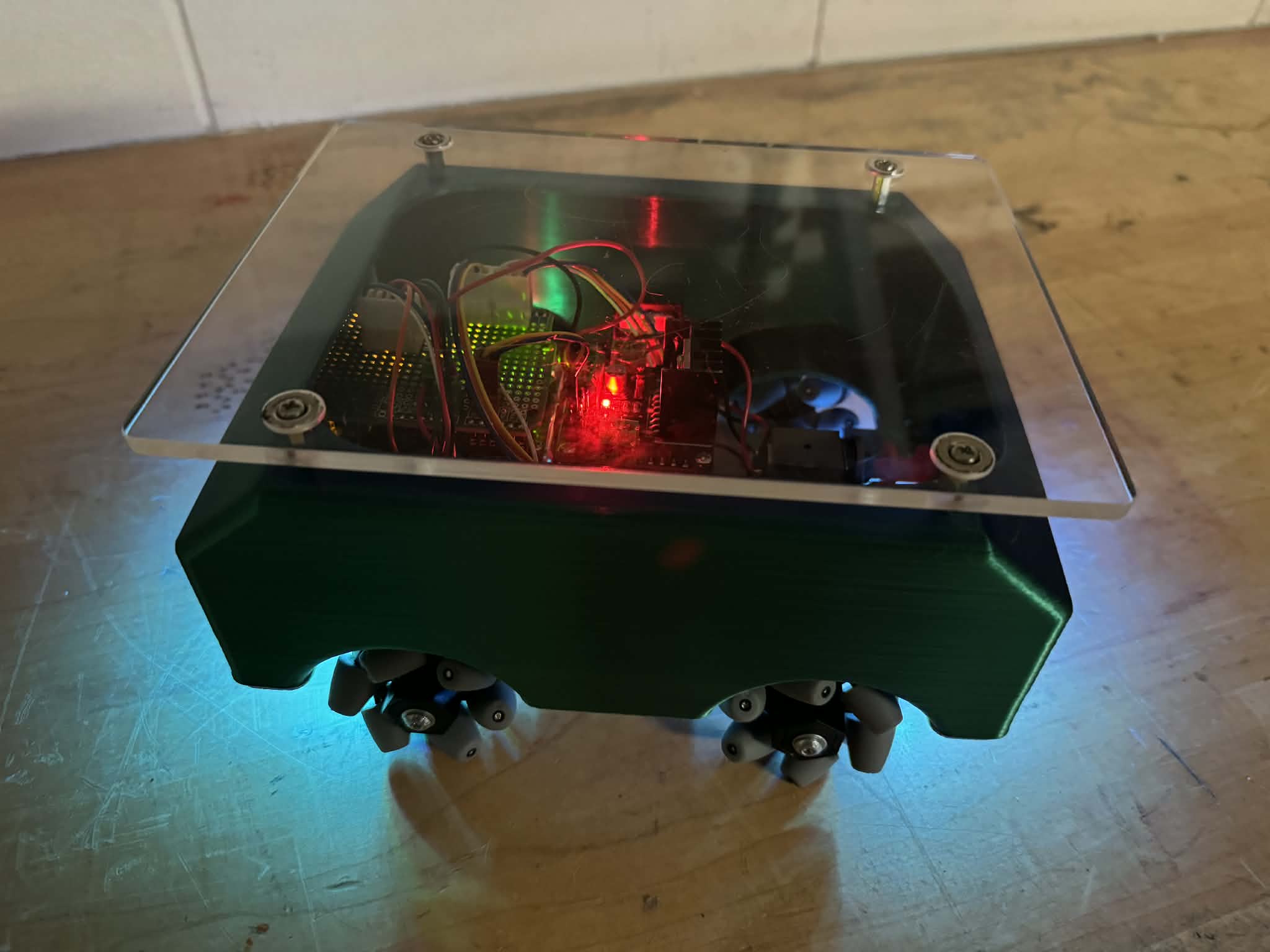
I’m working on a small omnidirectional robot using VEX 2" Mecanum Wheels (V2).
This robot was built as part of a team academic project, and due to project constraints we only had two motor options available. We ended up using micro DC gearmotors (380:1, 3 mm D-shaft) and designed custom 3D-printed adapters to interface them with the VEX mecanum wheels (1/4" square).
From the beginning, we knew this adapter-based solution would not be mechanically durable, but it allowed us to complete the project and validate the kinematics and control. As expected, the adapters are now causing slippage, alignment issues, and wear, making the robot unreliable in practice.
For additional context, the original project required the robot to climb a 15° ramp using a deployable bridge mechanism, as well as a small pulley-based system to retrieve rivets. These requirements strongly influenced the initial motor selection and overall packaging. Now that the project has concluded and the robot has been retained by two team members for further development, we have the opportunity to revisit some of the temporary mechanical compromises made during the project. Our goal is to optimize the drivetrain for reliable omnidirectional motion, without being constrained by the original competition-style requirements. Rather than iterating further on custom adapters, we are considering whether switching to a more suitable motor solution would provide a more robust long-term outcome. Given the sensitivity of mecanum drivetrains to mechanical play, we are particularly interested in standardizing the motor–hub–wheel interface as much as possible.
Context / constraints
- 4 × VEX 2" Mecanum Wheels (V2)
- Arduino UNO based control
- Battery powered (~6 V, 4×AA)
- L298N as drivers
- Priority is reliable omnidirectional motion, not climbing ability or high torque
Ideally, we would keep the L298N drivers because our drivetrain and electronics layout relies on acrylic mounting plates that were designed specifically around their dimensions, and we don’t currently have convenient access to re-making custom acrylic platforms. Our main goal is to solve the mechanical hub/shaft interface issues first; however, if changing drivers is truly necessary for a robust setup at ~6 V, we’re open to considering it.
Questions
- What motors have you successfully used with 2" VEX mecanum wheels on small robots?
- Are there DC gearmotors that integrate well with VEX hubs or standard mounting systems, allowing us to avoid custom adapters?
- Would you clearly recommend DC motors over stepper motors for this application?
- Any motor + hub combinations that have proven mechanically robust over time?
Our goal is to finally be able to use the robot reliably and take full advantage of the mecanum drivetrain without the mechanical issues introduced by temporary adapter solutions.
Thanks a lot for your experience and advice!
Here are some pictures of the prototype. Some pictures were taken before final cable management, but the mechanical drivetrain configuration is unchanged.