No one general answer is true in all situations;
That’s why its called an engineering trade-off.
Suppose you have a fixed 7 in-lb load powered by one 393 motor:
What does theory chart suggest happens to the total current through the PTC
if you add another 393 motor that shares the load equally?
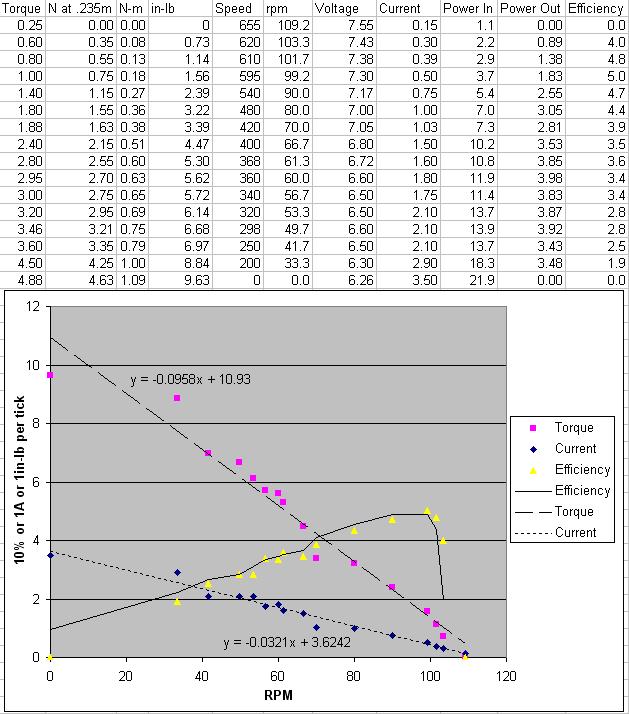
*By “per tick” on the y-axis scale, I mean “per single-integer increment”
Some interesting results:
The free speed was closer to 110 RPM than 100 RPM (this is partially explained by the battery voltage being 7.55V, not 7.2V).
The stall torque was closer to 9.5in-lb than 13.5in-lb.
The efficiency keeps climbing until about 90% of free speed, at which point it quickly drops off.
Conclusion:
I’m going to maintain that the best speed at which to run the motor is between 65% and 70% of its free speed.
50% to 55% is best for maximum power out.
About the equipment and procedure:
This was done with an almost brand-new 393 motor, powered from a 3-wire port via a motor controller 29 at an input value of 127.
The measured torque is the torque that is required to keep the motor case from rotating, so the readings are the exact torque that the motor outputs. The current and torque were very jumpy, but we tried to pick a value that was on the middle-to-high end of the values.
If anyone wants a picture or ten of our setup, I’d be happy to post one.
Mark, the odometer has rolled over Well, not an odometer but you know what I mean.
Yes, I would like to see a picture, thanks for doing this test.
I recently acquired a VEXpro, it has the ability to measure back EMF and (I think) current. It also mentioned something about the ability to limit torque somewhere in the documentation. This feature does not seem to be exposed in libquerk but looks fairly easy to get at so perhaps this test could be automated.
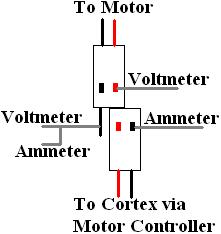
The black box on the table is the force meter. The black box on the stand is the rotation counter. The larger multimeter is the ammeter. The smaller multimeter is the voltmeter.
The circuit:
Cortex
Motor Controller 29
Ammeter
Voltmeter Probe 1
Motor
Voltmeter Probe 2
Motor Controller 29
Cortex
The voltage across the ammeter is about .3V at 3.5A, but that doesn’t really matter except to say that at higher currents, there is less voltage being supplied to the motor. The values above give the voltage across the motor.
Why, yes it has… On a related note: I have been working though the Back Log of your posts and have been finding many valuable pieces of Information… It is almost overwhelming, getting caught up with the Cortex and its Various Options and Implementations…
I second ( or third ) that… All technical information about the Vex Platform, that is provided or discovered, makes the Platform as a whole, a better Learning Tool as well as a better Platform for Experimentation. Plus, the process you went through to learn about Torque Curves is the exact thing you would do for certain Jobs… And you haven’t even been to College yet…
Congratulations on getting your VEXpro… Talk with Quazar about that… He seems to have a good grasp on the whats, hows and whys of the LibQuerk Library…
No problem! I was surprised that VEX hasn’t released their test results yet (the ones Paul mentioned).
I just realized that it’s nigh-impossible to see where the alligator clips clip onto the motor wires, so here’s a close-up view of what you see in the third picture.
[attach]6106[/attach]
I’m actually a senior in high school (for two more weeks), so all the applications are in, but I’ll certainly keep these in mind when applying for whatever I’ll apply to. I did link to our high-hanging Round-Up robot description in some of my college apps, but apparently MIT didn’t appreciate it enough
As my homework load decreased (second-semester senior), my time on VEX Forum seems to have increased drastically. The Mecanum wheel chart was to (hopefully) give people an understanding of the forces involved. It didn’t seem to very helpful for programming, but then magicode came to the rescue. I’m glad you find it helpful!
This thread has raised two issues that I’m going to continue discussing in threads of their own for clarity.
Motors are reaching full speed at values lower than control value of 127 (or -127). Having taken a new look at this it seems that both ROBOTC and EasyC only have a usable range of plus/minus 100 (although as I will show I think this is probably a master firmware issue not a ROBOTC/EasyC issue). This only effects the RC ports 2 through 9, ports 1 and 10 behave as expected.
The control value to output speed is non-linear. Not much we can do about this but I repeated this test using a VEXpro and found a much better linear response.
Thanks for finding that, I had forgotten posting it.
Similarities to dontworryaboutit’s data:
free speed is 110 vs 100 rpm speced.
measured stall torque is well under spec:
– jg: 6yr old 3-wire data: stall at 4.3 in-#, vs spec of 6.5
– do: 393 torque mode: stall at <10 in-#, vs spec of 13.5
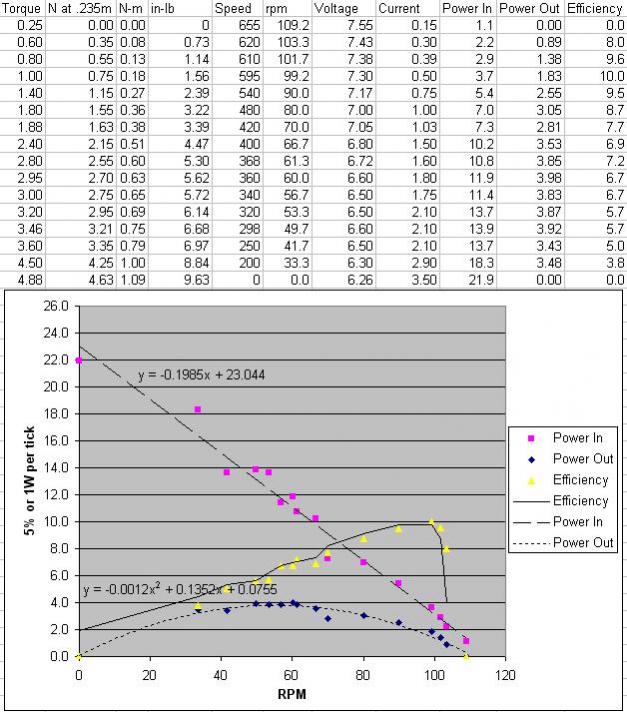
(too bad power out is only tabled, not plotted)
Designing for 60% of max datasheet torque on paper,
may put you at 80+% of available torque in practice.
Was the rated stall torque for the 3-wire motors 6.5in-℔? Its product page appears to be gone.
So now the question is:
Where’s the torque being lost? Is it in the meshing the internal gears? Is it because the motor itself is overrated? Is the rated stall torque actually the peak torque the manufacturer ever recorded?
Please understand that testing the stall torque on these motors is very difficult with the standard set-up as the PTCs trip depending upon the conditions. In addition, the values that we have posted on the web are based on testing a batch of 30 motors for each type and that there are always some motors that perform better than others. The motor manufacturers (of the little motor inside the gearbox) state that their specifications are +/-20% on actual production motors. Our specifications are based on actual test data of their production motors.
We also randomly test production batches and have no reason to believe that the published motor data (on our web site) is inaccurate.
I also want to say that the original point of this post was to try and determine if a 393 motor was going to over stress the cortex and pull too much current. If we turn the whole argument around and say, “I have a 1A current budget, what can I do with this”
The theoretical answer is.
The 269 motor can give you 2.93 in-lbs of torque at 66 rpm. (and will trip it’s PTC sooner)
The 393 motor can give you 3.38 in-lbs of torque at 75 rpm.
There are obviously other design considerations but in this simple case (assuming you can determine current and I will get to that in another thread soon) the 393 is the more powerful choice.
Huh. So when they say that you’re allowed to use 10 393s but you have to take into consideration whether you want to be drawing that much current or use the 269s, it’s simply better to use all 10 393s?
Of course, you have to take care not to draw too much current anyways, but that’s an implementation issue (you’re not “doing it right”).
I wish it was this simple, it’s not. Power use for each motor is very dynamic and changes depending on what the robot is being asked to do. I’m just trying to point out that in the decision to use a 269, 393 or 3-wire motor the maximum current is just one parameter to consider and a 393 may actually use less under a normal load.
I’m working on some code that uses requested speed and measured speed of the motor to estimate average current in an attempt to predict when the PTCs are getting close to tripping.
The torque output is proportional to the current input to the motor. So with the same output torque coming from a 393 and a 269, the 393 will be running faster than the 269, providing more power. However, if you stall one of your motors, a 393 will be using up a lot more current than a 269, so that’s the risky bit.
If the PTCs in the 393s can take a larger current than the PTCs in the 269s before tripping (which they should), then the 269s’ PTCs will trip before the 393s’ PTCs if they have the same output torque. The 393 has more output power, and can last longer before tripping a PTC than the 269 in that case.
And two motors in parallel will (theoretically) provide more than 2x the power for the same 1A current budget, as long as you are climbing toward the peak in the efficiency curve.

{kind=link}