Since many people already started prototyping their launchers I would like to begin a thread where we could share the theory and the experimental results from the flywheel launcher prototypes.
First of all, I assume that most students are either familiar with the concept of ballistic trajectories or at least heard the term. You can look up additional information in multiple sources by googling projectile+trajectory.
The basic principle you need to know is that in the absence of air, the distance traveled by ball would be:
![]()
Where θ and v are the angle and speed at which the ball is launched.
NbN balls are large and light. They have very low Ballistic Coefficient and will experience a lot of air drag.
For our purposes the most important diagram is this:
http://upload.wikimedia.org/wikipedia/commons/0/0d/Mplwp_ballistic_trajectories_velocities.svg
It is trajectories of an object with air drag and varying initial velocities for a fixed launcher angle. If you know how far the robot is from the goal you could throttle your launcher speed up and down to control where the ball’s trajectory will intersect the goal plane.
It has already been established in this thread that you need to launch the balls at 45 deg angle at about 8 m/s or 26 feet/s in order to reach the goal from your base tile.
Once you build your launcher you will need to plot actual distance vs motor power for the high and low goals. Ideally, you will create several charts for the top and bottom portions of both goals, as well as for several voltage levels of your battery. Even if you are planning to use quad encoder to know exact rotation speed of your launcher, you still want to know your limits when battery voltage goes down.
Here is a good picture of the forces acting on a flying tennis ball:
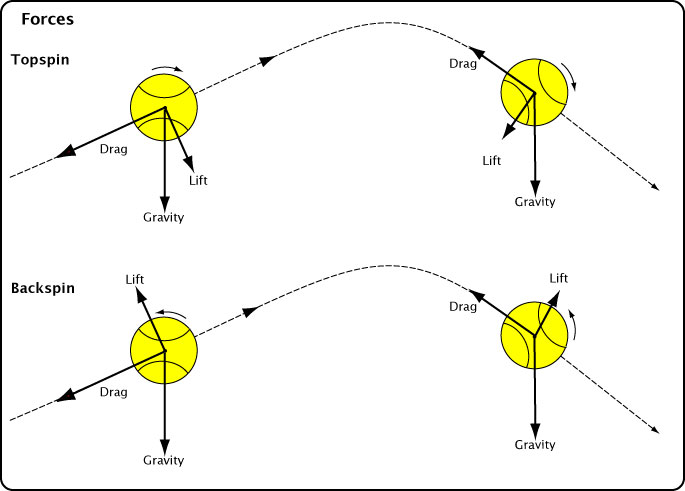
As you can see, depending on the spinning of the ball, it could receive additional lift and travel further (topspin) or land closer (underspin). I am not sure if this will be important for NbN, because our balls will travel much slower than the tennis balls.
Now we need to look in more details as what is happening inside the launcher and how it will affect initial velocity and exit angle of the ball.
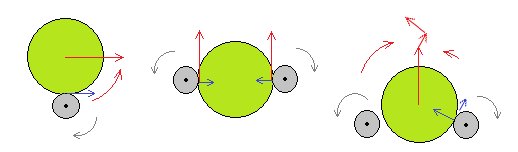
First, lets take look at the image on the left. Green ball is dropped onto the grey flywheel which is rotating clockwise.
We will assume there is good friction between ball and flywheel and there is no energy loss into the heat due to slippage and ball’s deformation (it is not true in reality but will make explanations simpler).
In the point of contact the flywheel will exert a force (due to friction) onto the ball and accelerate the ball both linearly to the right and give it some counterclockwise rotation (red arrows).
When the interaction is over the flywheel will lose some of its energy and angular momentum (it will slow down) and the ball will gain some linear and angular momentum (some additional amount of energy will inevitably be lost to heat due to the ball deformation and friction, but don’t ask about details - that’s all I know).
If you want to conduct an experiment, find a toy ball with some lines on it, so you can easily see it spinning. Rest it on the flat palm of your hand. Then swiftly move your hand horizontally to the right. The ball will end up spinning and will fall to the right of where it started.
The second image, depicts an ideal pair of flywheels spinning with exactly the same speed. The ball will be slightly squeezed between the wheels (blue arrows). The ball material will push back and this will create some friction between ball and flywheel’s surfaces.
When the interaction is over the ball will disengage from both flywheels simultaneously and angular momentum lost by flywheels will be converted into linear motion of the ball strictly perpendicular to the line connecting flywheel centers. There will be no spinning. Once again some energy will be lost to heat when squeezed ball decompresses.
However, in the real life, we will see situation depicted in the third image. It could be that the left wheel was rotating faster, the wheel’s surfaces were uneven, or the ball has some irregularities or damage. Regardless of the cause the ball has disengaged the left wheel while still interacting with the right one.
At that point ball travels forward and has some clockwise spin (red arrows). There are two forces by which it interacts with the right wheel (blue lines). First force is the result of expanding (decompressing) ball pushing against the wheel and equal but opposite force of wheel pushing the ball away. Second force is the friction between ball and wheel surface by which the flywheel still transfers some linear and counterclockwise angular momentums to the ball.
By the time the ball disengages from the right wheel it could end up flying left, right, or straight forward and having or not having some spin. I have no idea where it would go, as it depends on properties of ball materials and the reason it has disengaged from one of the wheels earlier.
If the surface of the flywheels is made as uniform as possible, contact points have exactly the same radii (from the wheel axles), and the only difference is rotation speed of the wheels - then my best guess is that it will travel to the left - in the direction of the faster wheel. But it could be just the opposite.
The bottom line is - make surface of flywheels as uniform as possible, feed the balls at the precise angle, consider adding a cannon barrel. And conduct accuracy testing with various flywheel designs - you never know what will work best with the particular types of balls for NbN game.
Finally, do not forget that, according to Nothing but Net field specifications:
So plan your launcher tolerances in advance - game objects will vary.
If anyone has a good insights into ball launching accuracy analysis and optimizations or have fresh NbN experimental results, please, share them here. I am sure the community will greatly appreciate that.