Here is a problem to think about:
https://vexforum.com/attachment.php?attachmentid=9614&d=1444006833
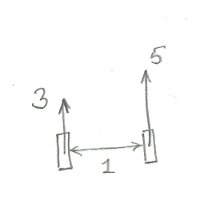
Let say you have a turtlebot with two wheels. Each wheel has its own independent motor and a quad encoder.
Can you say where the robot is after a unit of time has passed if the first encoder returns 3 and the second 5?
If you try to think about it you will realize that the problem has ambiguously many solutions. Now what if 3 and 5 are the speeds of the wheels turning. Can you predict where the robot will be after a unit of time or what its path will be if you just let it run?
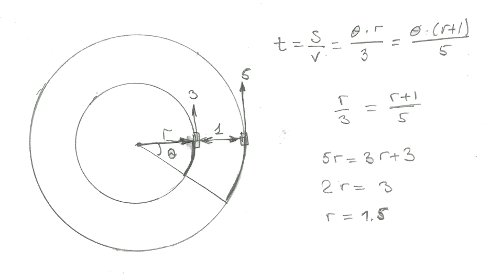
(Don’t look at the second attachment just yet - it has a hint. I will explain it in a later post)