Ok. How exactly is the lift not working properly? What is happening?
I’m assuming either it is going up crooked.
OR
It is not able to go up. (or both)
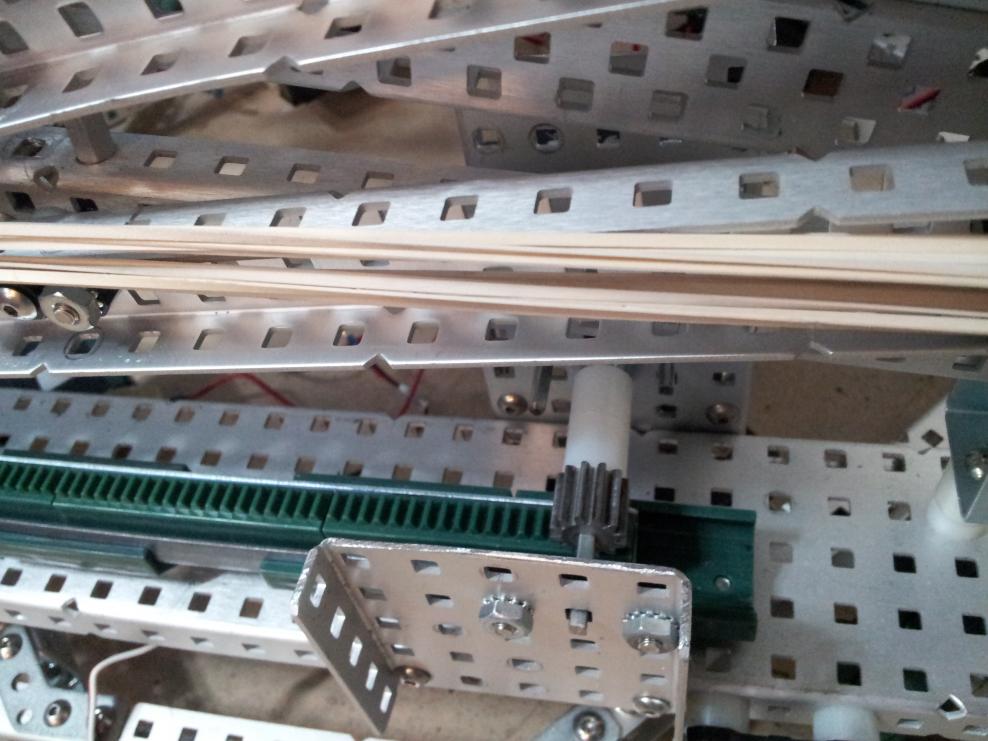
First of all, i would check to make sure your pinion gear and rack gears are meshing correctly. Do these skip?
Second, i would check to make sure that your linear slides are not binding up.
Third, you might want to try pulling the axles slightly out of the motor and manually moving the lift up and down to check for binding.
If you are confused anywhere here, let me know I’d love to help.
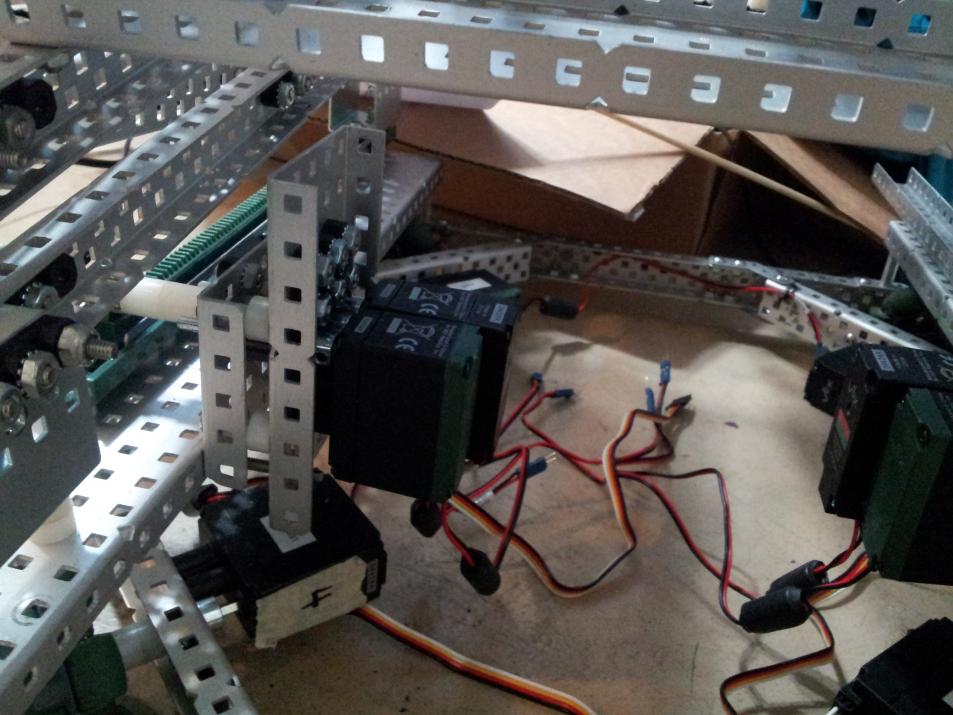
Just a quick comment from a safety standpoint: I noticed you are using keps nuts (aka “star nuts”) most everywhere. Those kinds of nuts are notorious for coming loose and, in my opinion, are meant only for prototyping machines. I would suggest you not use keps nuts on the screws to which the rubber bands are attached. If those screws come loose, the elastics will shoot them across the room, maybe hit somebody in the eye, etc.
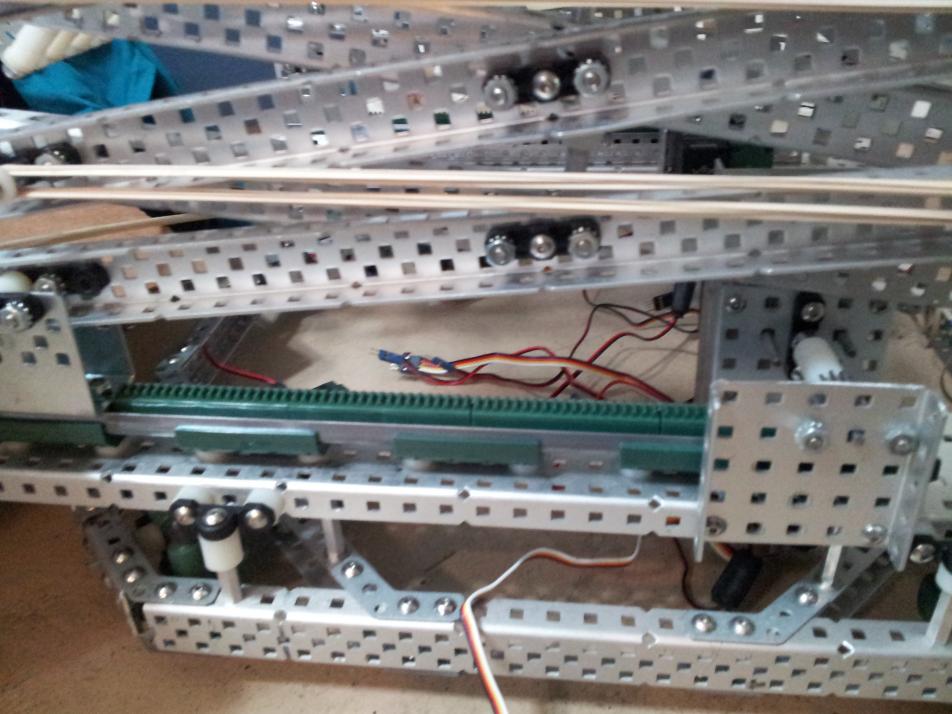
As for design, it appears to me that in the photo below, your steel rail is driven by the green rack and that the steel rail then moves atop the green plastic “trucks” (green bearings) you have mounted to your chassis. If that’s the way it works, have you tested to make sure the rail can actually make its way back into those green trucks (green bearings) after it has slid out of them as your scissor lift rises? A lot of times, when steel rails exit a truck (green bearing) like that, they don’t always find their way back in.
Just for clarification, our lift is able to lift (barely) but not with any additional weight (cubes, skyrise sections, etc.). For the most part, it lifts straight and we are currently working on software to fine tune this. We have reduced most of the friction between the rails and the slides and have applied a bit of graphite onto the rails as an added precaution. The rails have not come out of the green trucks and slide smoothly across. The pinion gear and the rack gears do not slip.
The elastics are attached on metal standoffs with spacers at the end to keep them from coming off.
Our main problem is lifting. We currently have four motors on high torque powering the lift.
Is there a way to optimize our lift so that we will be able to lift multiple objects and still be able to lower the lift quickly (we have tried adding more elastics and the lift will not lower quickly)?
If you can’t add more ru bber bands and don’t want to increase the gear ratio, then you could make the lift shorter. Or you could power the lift differently (using vertical racks or a gear at the center joints of the stage(s)). I imagine that your lift has most of its trouble lifting when it is just getting started from all the way down?
One of our teams has built a robot with a scissor lift. They are using turntables (http://www.vexrobotics.com/276-1810.html) with four motors to power it, and they don’t need elastic bands to lift it. They may add them to help keep it up when it has a scoring object. They are using linear slide tracks on the chassis. See our club blog for photos.
Our 4-H club has three middle school teams. One of our teams competed in early December and ended up as one of the three tournament champions. They built a linear lift robot with three stages. One thing they realized at the competition was that they really didn’t need the height to reach the high post or even the middle post to do very well at their competition. They could score three skyrises consistently, and sometimes they could also get cubes on their skyrises. Because of that experience, our team with the scissor lift decided to take some of the bars off the top of their lift and focus on learning to drive their robot so they can consistently score skyrises and cubes. That earns them more points than going for the cubes on the posts. They run out of time before they are limited by height.
Perhaps you don’t need the extra height so you could take some bars off your scissor lift. That would make it easier to lift and easier to drive. If you time your driver and see how many skyrises and cubes they can score in 1 minute 45 seconds, and they aren’t limited by the height in that time, you may want to go with a shorter lift.
While you have some points and it is indeed possible to compete with a scissor lift of the height that your team has built at a middle school competition, it is unlikely to be successful at any of the high school competitions ive been to as it defeats the purpose of a scissor lift in this game: fast and efficient skyrise building (faster than linear lifts and more efficient than 8-bars due to the 8-bar’s arcing lift). I’d advise actually replacing the horizontal pinion with a driven gear in the center of one of the sections.
First off, this method of powering the scissor is the least effective compared to the others, because of the fact that it takes more power to lift the scissor at the bottom, but less at the upper ranges of motion.
In addition, the number of green brackets you have on one moving slide is going to add a lot of friction that would’ve been avoided had you made the green slides attached to the scissor and the metal slide to the chassis.
I recomend using the rotationaly powered scissor lift from the center.
Recently 4 stage, 6 motor 1:7 scissors with full length 35 hole c channels have been very popular.
Thanks for the advice! My team has tried this before and instead of lifting, the force from the motors ended up twisting the axles we used. Is there an easy way to get around this problem?