What. Did. You. Say.
Please use better grammar, spelling, and sentence structure on the forum. I have no idea what you just said.
What. Did. You. Say.
Please use better grammar, spelling, and sentence structure on the forum. I have no idea what you just said.
I think he said: "I know that perfectly aligning the Robot with the Loader allows for better intaking alignment. Therefor, making our overall scoring strategy much quicker.
My advice:
I believe you are developing, and also optimizing, too rapidly.
I would suggest to CAD design the intake FIRST, make it reliable and ignoring the rest of the robot, and then build the robot around the intake.
You should be like 2-3 intake iterations before you build your robot.
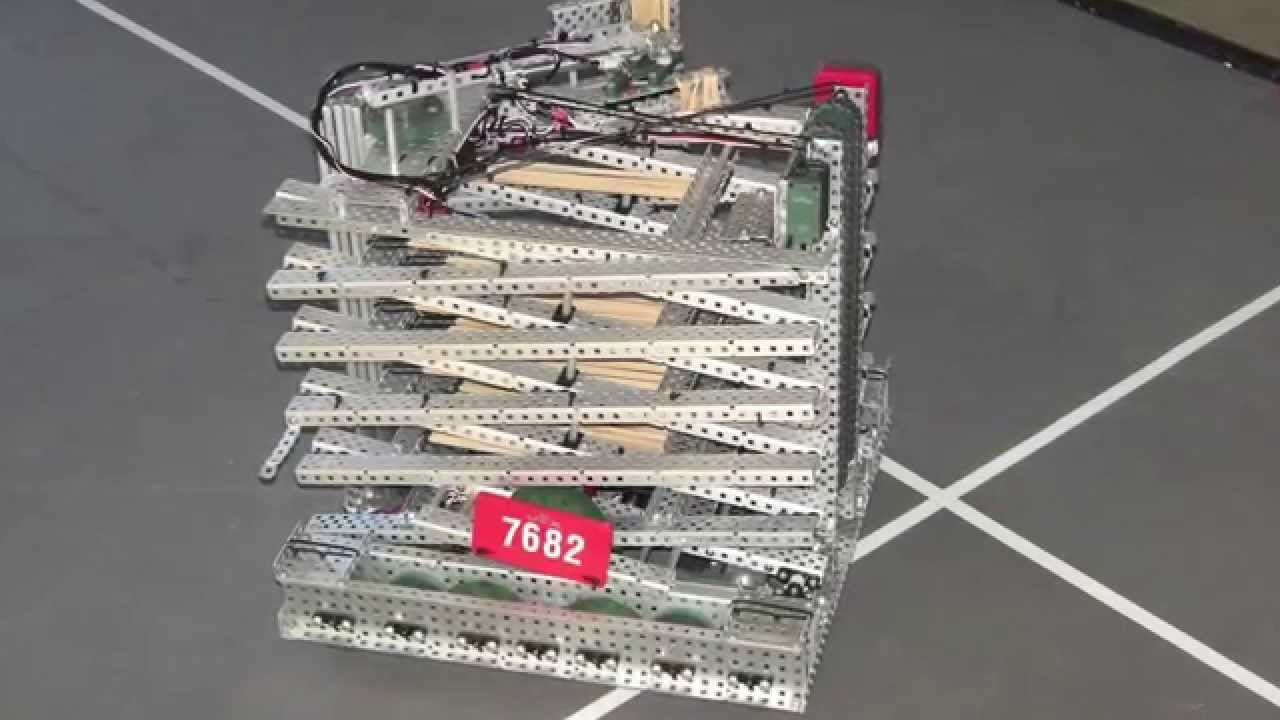
I don’t know if I want to break it to you, but scissor lifts are very heavy in practice and require an exceptional amount of force to start lifting when its collapsed:
Personally, my advice is that you can try to build it but I don’t think I would compete with it long-term.
I’m actually so sorry I did not mean for my grammar to be so bad
I ment to say the intake is for quick alignment
An idea that is ambitious for our team that we are going to try is a X-drive base with a differential elevator with rotating wrist and claw.
May find out that it does not work but fully trying to complete.
That in take is a really good idea. The only thing I would add is some sort of grip like mesh or a wheel.
I already have 8 wheels on it, do you mean smt else?
The intake on the front of the bot. I think you got mixed up when I said traction wheel but that is for grip on the cups and stuff. You know?
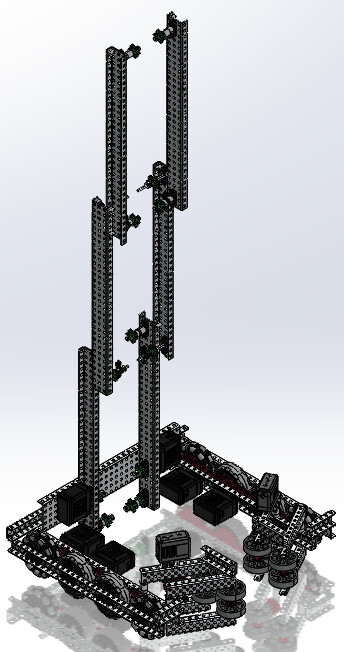
nice and clean design!!
are you going for 44 Watt drive base? or are you saving the 11W for some other mech?
Yes 44 watt drive base, plan to use the final 11 watts to get the elements up to the claw.
Well, by the same logic, a kangaroo is essentially a DR4B with internal storage and hop based locomotion.
Seriously, though, DR4B could reach as high as the scissor lift, but with less weight and thus smaller moment of inertia. Also, it is easier to build, and has less friction than any elevator lift.
Here is a very good tutorial on building DR4Bs.