I am trying to redesign a Drivetrain for our robot, since I completely screwed it up earlier in the season. Right now, it uses green motors (200 RPM) Geared up 84:36, which is simply too fast for out team, and really is too fast for any VEX V5 robot in general.
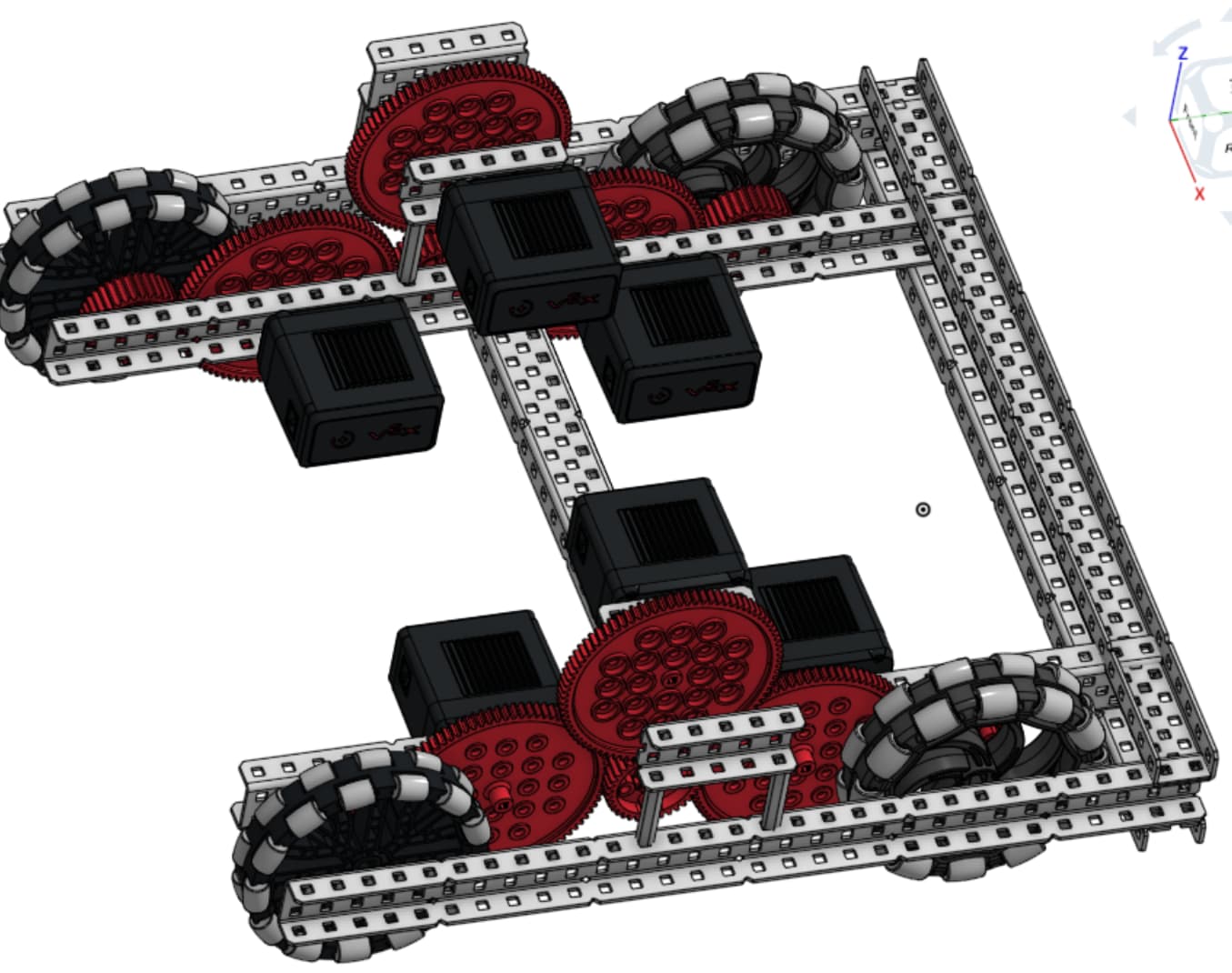
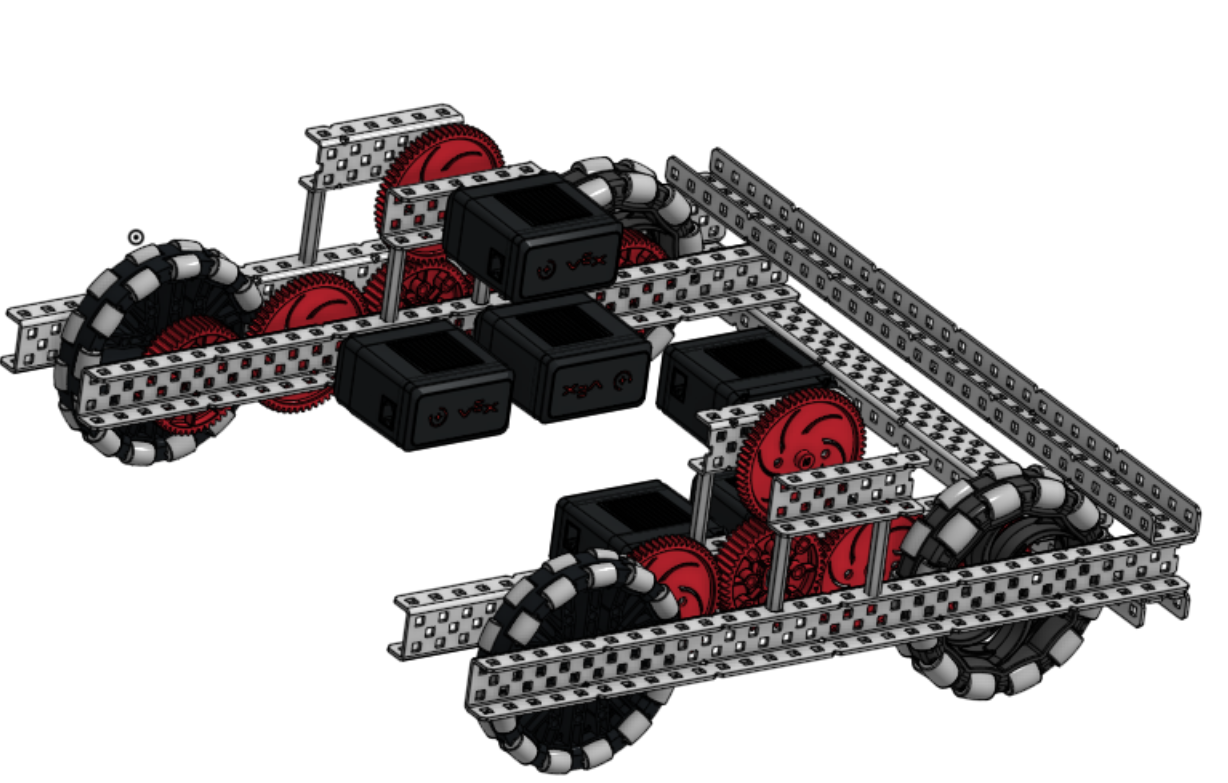
I was wondering if I could get some support in designing a new one? I am able to use 6 motors for the drivetrain, but we can only use green motors, our team lacks 72 tooth gears specfically (Kind of annoying, I know.), can only use 4 inch wheels, and is a little limited on space. I’ve considered changing the drivetrain to 250 RPM by having the green motors geared up 60:48, but I wanted to hear what some other people would think. I have a few screenshots of the current drivetrain down below (I can always send over some more if you need it). Thank you for the support!
Honestly, you might just want to run 200 direct if you can’t get different cartridges or gears. For our first robot we ran 200 direct on 4 inch wheels, the only issue was that we used only 4 motors and all omni, we got pushed around quite a lot so you might want to do a traction wheel in the middle. It was a little slow but very simple
Thanks! I have tried to use the resource before, but I found that none of drive gearings fit the materials that the team has or are too big to fit onto the actual frame of the chassis. It’s why I’m asking around to see if anyone else has ideas.
Honestly your current setup might be the only option for 4" wheels, if you had 3.25" wheels then 333rpm would work nicely (just under 30 holes, 36 and 60 tooth gears), but if you are absolutely desperate you can try using chain and sprockets to get a good ratio.
Kind of another thing I had in mind. I was able to CAD this drivetrain I was also thinking about. It is 250 RPM, using Green Motors geared up 60:48. Any thoughts on this one? (Sorry for the poor CAD, I don’t have much time on my hands to make them very refined.)
Its probably one of the only solutions that I may have, you’re right. The problem that I have with the drivetrain right now is that it is geared up 84:36. With green motors, that makes that drivetrain go almost 97 inches a second, so I’d have to lower the power to the motors in order for it to go a reasonable speed. Probably not the most optimal thing for this season, but I would do it if I had to.
I would possibly consider the chain and sprocket though, if the team wants a faster drive speed that is within reasonable levels of torque. Thanks for that recommendation!
Something I could not get out of my head. Would it be okay to put on traction wheels in the chassis, but just have them free spinning? I thought I’d ask since I had a feeling that friction and maybe turning could become a problem, but running just Omni wheels is probably just going to get us pushed around. (You can use the drivetrain designs that I put in this topic for reference.)
Why do you need a six motor drive? Unless your robot is really heavy, a four motor drive with green motors should work perfectly fine torque wise and it would leave you more motors for mechanisms.
This robot is most likely going to be on the denser side of the spectrum. Not to mention, our pushing strength would be very limited in comparison to other 6 motor drives, which is seemingly are only becoming more important this season. We also are using a robot design that only uses 2 11 watt motors for the intake, so having extra motors for other mechanisms seems unneccesary. Call me out if I’m wrong though.
6-motor drives allow for you to be faster without sacrificing the power that the gear ratio provides. For example, we gear our drive for speed slightly while using blue cores. The reason that we can still push people is because of those extra two motors on the drive. Additionally, half motors allow for another four motors for other mechanisms
4 inch wheels is going to limit your drivetrain options quite a bit to be honest, but there’s still plenty of options. Linked here is a thread I go back to a lot with some common options, including those for 4 inch wheels. Good luck!
I think you should probably at least try to see if the robot can drive with only 2 motors and if that doesn’t work then stay using 6 motors. And if you have access to 24 tooth gears you could try swapping to a 84:24 gear increase using four red motors to drive. I calculated it and this should get you a speed of ~73in a second while only losing you ~0.3 Nm of torque.
Also, this is kind of unrelated to this specific issue, nor is it necessary you do it for any reason as it is based purely on my own opinion and experiences. But I recommend you use mechanum wheels. I understand they can be challenging to create the proper code to be able to use them to their full potential, but if you can manage to do that they give nearly unparalleled amounts of mobility compared to drivetrain complexity as all you need to do to in regards to modifying your drivetrain is change the wheels. Mechanum wheels also have the benefit of being significantly more difficult to push side to side by other robots than omni wheels. If you do decide to try to use mechanum wheels and run into any troubles I can help you figure out how to use them; of course I wont just outright give you a code for running them because I want to make sure you actually learn something from it.
Here are a handful of very useful tips (if you can use them) that help immensely with making an effective drivetrain.
If possible, use blue cartridges. They are better than green ones by all means due to less internal friction.
Look up viable gear ratios/speeds, but the general top 3 are 600 rpm 2.75, 450 2.75, 450 3.25. We personally use 450 3.25 and it has been very good for us.
USE 6 11 WATT MOTORS FOR YOUR DRIVETRAIN. You do not need more than 2 for other things (unless maybe you are short on pneumatics and dont have 5.5Ws) and has been the best option for a long time and maybe always will be.
Screw joint your wheels (look it up, massively helpful for weight, friction, preventing damage, structural stability, and more. Objectively better in every way compared to axles.)
Try boxing your drivetrain when making it to make it straighter (look it up)
Make sure to have at least one full length crossbrace and at least one additional crossbrace, as well as small braces on the front and back of the left and right, keeps it together way better + more mounting points
Regardless of weight, it has been accepted for a while that if possible, 6 motor drives are the move. At least 90% of teams at Worlds last year (at least for high school) used 6 motor drives.