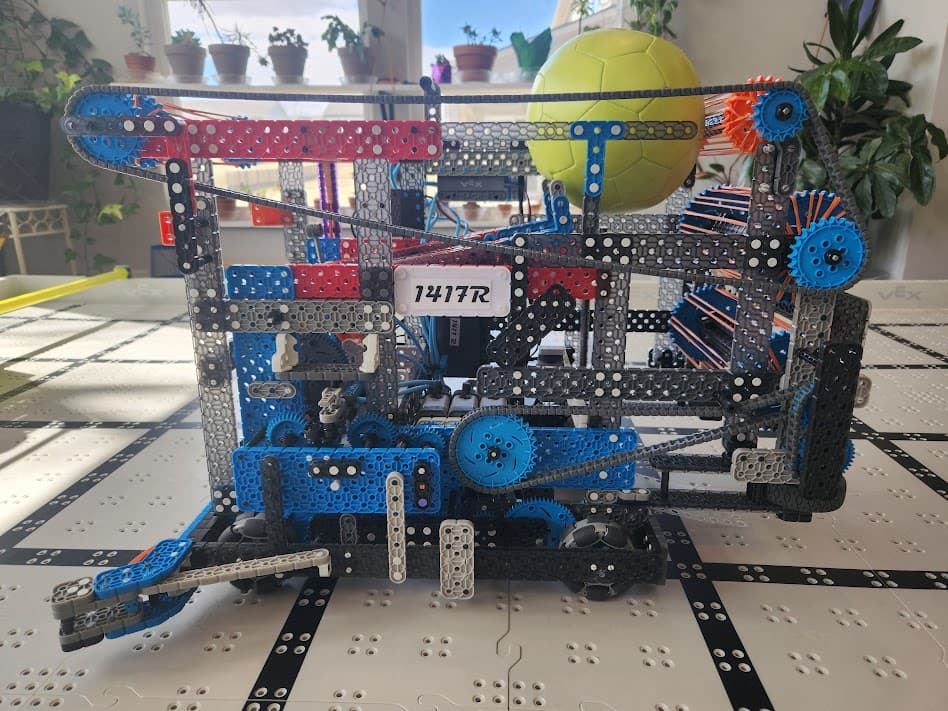
Awards:
4x Tournament Champion
3x Excellence Award
1x Robot Skills Champion
1x Robot Skills 3rd Place




Motor allocation:
2m 5:2 drivetrain
1m 1:1 H-drive
3m PTO for T-Fling and intake
Innovative aspects:
Our two most innovative aspects of our robot are our H-Drive and our intake.
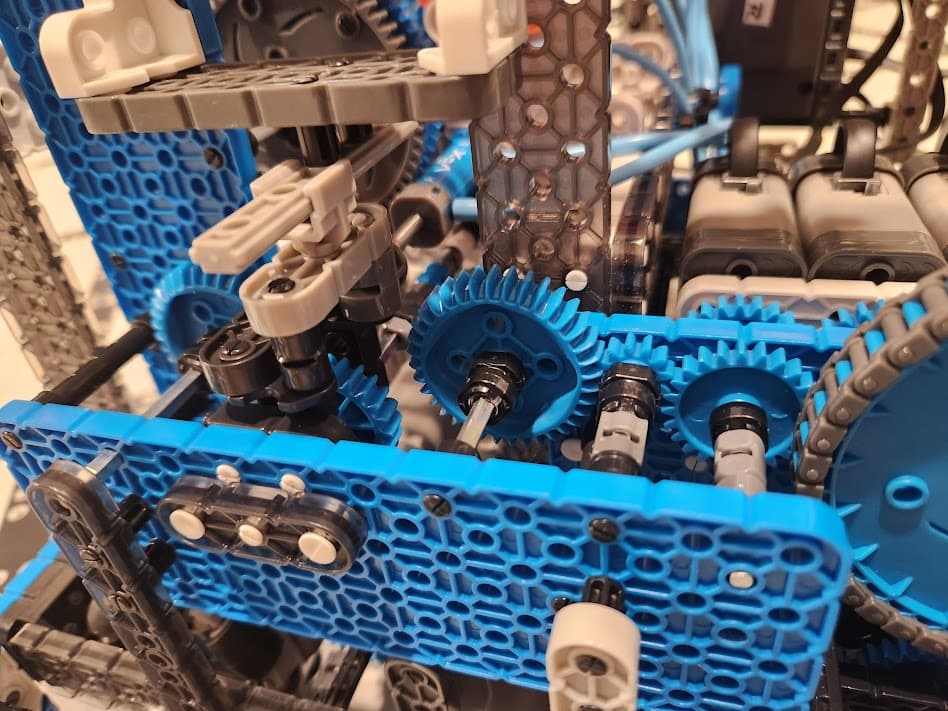
H-Drive
The Deca-drive is a modified H-drive that uses the rotational force of the of the strafing motor to engage the strafing omni-wheels into the field. We use two brackets: one that pivots and houses our two strafing omni-wheels, and a second, stationary bracket to hold the inner one and connect it to the drivetrain. Both omni-wheels are connected together by gears, so that both spin in the same direction. This design allows to always have traction with the ground when strafing without putting stress on the strafing motors from being forced into the ground as with other designs.
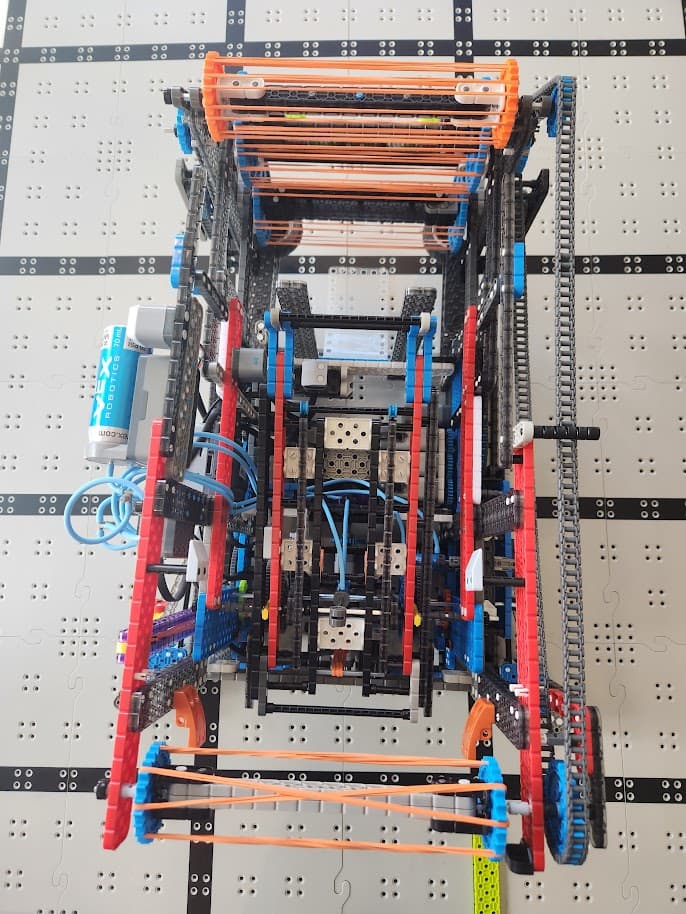
Intake
As you can see, we have horizontally placed wheels on the front of our intake. This allows us to have a larger intaking range, helping us intake balls when they are touching the loading station or are in the corner.
I’ll post our engineering notebook once I receive it.
If anyone has any questions, feel free to ask them!