This is a compilation of descriptions and pictures of our robots, that we have decided to share with you, the community. These three robots will be going to the VEX World Championship, and we hope to see you there! Please feel free to ask any questions you may have on any of the three robots in a comment, below. Thank you, and I hope you enjoy! ![]()
24A
[ATTACH]3847[/ATTACH]
Claw, powered by one 3-wire motor, geared down 5:1.
Claws make for easy scoring and pickup of single tubes, as well as quick and easy descoring. Claws also allow for easy and quick pickup or stacks, so putting opponents’ tubes into the ladder is done very quickly.
Claw has small tabs to hold a single ring tightly, such that the robot will not lose the tube if scoring was not dead on, and you can try again.
Claw is lifted by a 4-bar, powered by four 269 motors, geared down 5:1.
4-bar uses algebra to apply constant power, to keep it from dropping due to gravity.
4-bar also has preset positions, (Floor, BottomBaseGoal, TopBaseGoal, etc.) which are switched between using buttons.
Tank style drive, with 4” high-traction wheels in the back, powered by four 393 motors, internally geared for torque and externally geared up 1:2. 4” omni-wheels are chain-driven in the front.
2 different autonomous programs (two different routines for every position on the field), switched between using a potentiometer on the back.
Highest scoring 20-second autonomous program scores 33 points.
Autonomous modes use a variety of sensors:
2 Quadrature Encoders are used on the drive (one on each side). Auto-straightening code is used, along with ramp-up and ramp-down code, for the most accurate and consistent results in autonomous.
5 Line Followers used for following the white tape lines. Line following code has been worked on a lot to get it perfected, and the robot can now follow the line very accurately, and fairly quickly, as well.
3 Potentiometers – one on the 4-bar, one on the claw, and one for the autonomous selector.
Preload tube-holders on each side, to hold the preload around the wall-goal if placed on the far side of the field. (known as the “prescore” or recently on the VEX Forum the “cheater tube”…)
Weight is ~16 pounds. (excluding any tubes)
5 experienced team members, all going to Worlds. (3 have been to Worlds twice, and 1 has been there once.)
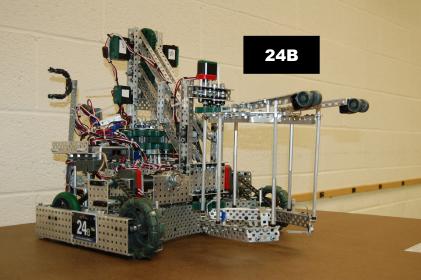
24B
[ATTACH]3850[/ATTACH]
Claw, powered by one 3-wire motor, geared down 3:1.
Claws make for easy scoring and pickup of single tubes, as well as quick and easy descoring. Claws also allow for easy and quick pickup or stacks, so putting opponents’ tubes into the ladder is done very quickly.
Claw has descoring flaps on the top, used to easily descore the wall-goals.
Claw is lifted by a 4-bar, powered by two 393 motors, internally geared for torque, and two 269 motors, all externally geared down 5:1.
4-bar is pivoted by a turntable, which is powered by one 3-wire motor, geared down 7:1.
Tank style drive with 2-speed transmission, 4” high-traction wheels in the back powered by two 393 motors internally geared for torque, and two 269 motors. 4” omni-wheels are chain-driven in the front.
Transmission can switch between gearing down 5:3, to gearing up 3:5 in an instant, using pneumatics to do the shifting.
2 Quadrature Encoders on drive for maneuvering in autonomous mode.
2 Potentiometers, one on the 4-bar, and one on the claw.
2 different autonomous routines. (can run on any position on the field)
Highest scoring 20-second autonomous program scores 20 points.
Preload tube-holders on each side, to hold the preload around the wall-goal if placed on the far side of the field. (known as the “prescore” or recently on the VEX Forum the “cheater tube”…)
4 experienced team members, all going to Worlds. (3 have been to Worlds twice, and 1 has been there once.)
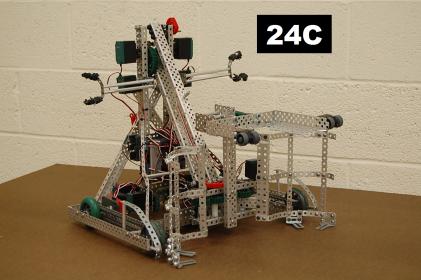
24C
[ATTACH]3853[/ATTACH]
Claw, powered by one 3-wire motor, geared down 3:1.
Claws make for easy scoring and pickup of single tubes, as well as quick and easy descoring. Claws also allow for easy and quick pickup or stacks, so putting opponents’ tubes into the ladder is done very quickly.
Claw has descoring flaps on the back, which are motorized by one 3-wire motor, also geared down 3:1. These are used for quickly and easily descoring the wall-goals.
Claw is lifted by a 4-bar, powered by two 393 motors, internally geared for torque, and two 3-wire motors, all externally geared down 5:1.
Tank style drive, with 2.75” wheels in the back powered by two 393 motors internally geared for torque, and two 3-wire motors, all geared up 1:3. 2.75” omni-wheels are chain-driven in the front. (Using small wheels allows us to reach into the ladder, which makes it possible to descore/score on goals dropped into it.)
6 different autonomous programs (6 different routines for every position on the field), switched between using a potentiometer on the back.
Highest scoring 20-second autonomous program scores 33 points.
Autonomous modes use a variety of sensors:
2 Quadrature Encoders are used on the drive (one on each side). Auto-straightening code is used, along with ramp-up and ramp-down code, for the most accurate and consistent results in autonomous.
5 Line Followers used for following the white tape lines. Line following code has been worked on a lot to get it perfected, and the robot can now follow the line very accurately, and fairly quickly, as well. (It is possible to follow the line at a full 127. It is not as accurate as going slower, but it’s been proven possible.)
3 Potentiometers – one on the 4-bar, one on the claw, and one for the autonomous selector.
2 Jumpers are used to tell the robot it’s alliance color (Red/Blue) and position on the field (Near/Far) for knowing which direction to turn (in autonomous)/which autonomous routine to run.
Preload tube-holders on each side, to hold the preload around the wall-goal if placed on the far side of the field. (known as the “prescore” or recently on the VEX Forum the “cheater tube”…)
Weight is ~7 pounds. (Excluding any tubes – with 4 tubes it’s ~8.)
5 experienced team members, 4 going to Worlds. (All 4 have been to Worlds twice.)
Thank you for reading, and feel very free to leave comments or questions! They would be much appreciated. ![]()
~Jordan