I am cadding a bot that is 36:48 and it has a PTO for a teir three hang, but I only have space for 4 wheels(2 per side). I am not sure if this is the best Idea. Any suggestions?
What are you worrying about? Sinking into tiles, tipping a bit, or no center traction wheels?
For tipping, I recall you have posted this so I don’t think you’re concerned about that
For no center traction wheels, faster robots can go without that.
Sinking shouldn’t be too much of a problem with both 3.25 and 2.75 wheels, although it might be a bit worse than it could be.
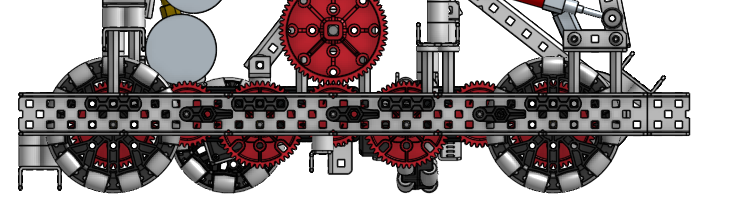
It works, that is similar to what we have
4 wheels is fine. Just make sure they are all the same size
I would say you could gear all the wheels together and shove the PTO on top of the gear attached to a wheel. So put the PTO above a drive gear. Though do make sure you make all the gears the same size so the gear ratio on the drive isn’t thrown off by a different sized gear.
Also, having them all geared together makes it so that if a drive motor fails, another motor is still powering the wheels.
Unlike your wheels, you have a very lopsided robot. No offense
… So a couple of things, I understand you don’t mean any offense, but I am a freshman in a robotics program that is only two years old, the older members barely knew anything so I had to teach myself how to build and code. The current bot is my fourth rebuild. I had asked this question because for the next bot, I designed their three climb and taught myself Odom and PID. If Our parts arrived when they were supposed to, we would have had a t3 bot about 3 weeks ago.
It looks like your robot is not lopsided, when teams at our school have those is usually means it’s lopsided, yours looks good for the space you have!
Yeah, my robot not great lol
I learned most things myself, but i did get some help from 1060B and 1060A from last year
I was using 4 wheels this entire year. As long as you’re using a 4 motor drive, it’s perfectly fine.
Im running a 6 motor drive
4 motor drive!! how are you using your other 44w?
Have you never heard of a 6-motor drive? It’s very competitive and almost all teams use that. You can gear the wheels together and use 3 motors per side.
Well, if you don’t have access to 5.5 W motors or pneumatics, perhaps:
4 motor drivetrain
1 motor ring mechanism/intake
1 motor mobile goal mechanism
1 motor wall stake mechanism
1 motor for doinker or hang
Yes as a school @SpencerFrom1060 we do not have 5.5w and a very limited number of pneumatics, specifically for our team so a younger team like his does not have access to pneumatics.
Kinda late but we used 1 red motor for our claw and 2 red motors to lift up the claw arm. I’m not sure what the wattage was though.