I believe that the lift has high speed motors and not turbo. Also, is there an advantage to only having the middle wheels powered and not the back and front ones. Also, i have seen many teams in my area going with the 3.25" omni wheels instead of the typical 4" omni wheels. I’m really confused becasue for the robot i wanted to make I wanted to use 4" turbos, but alot of the good teams in my area have 3.25" high speed.
4" wheels on turbo motors is running very close to the limit on 4 motors. Smaller wheels give you more torque because per rotation, you travel less distance. A 4 motor turbo drive on 4" would need your bot to be lighter than 10lbs at most.
Responded, good luck with the school project
^^^^^ yep. It also has a built in bias to be more likely to tip back because most the time its against the fence and doesn’t matter and it can self right.
The robot is about 8lbs btw, which is why it can hang so fast.
The axle goes straight from motor to motor.
cough aaron cough cough
Motors hold the shaft in place, and act as bearings. If you look at his robot, with the way he has done it, there is no need for bearings anywhere. His chassis is done with one shaft being double motored, meaning he doesn’t need a bearing on either side. For his arm, the only shaft that isn’t double motored is on pillow bearings. And his caster wheels are also on pillow bearings.
What I do, and I’m not sure if Cameron has done this here, is I drill out the hole where my motor will be going. Makes me feel safer not using bearing flats that way.

^ My robot ![]() Ty aaron xD
Ty aaron xD
Here’s some extra video taken from a scrimmage with 7700 a few weeks ago:
it doesn’t make a difference who is mentioned… i have no idea which reverse claw belongs to who ![]()
62 is the one on blue side closest to the camera. Not 100% on the other team numbers.
Maybe it’s not like this in cali but in texas that could mean a lot of things. Care to elaborate? ![]()
Also, have you had any axle bend issues on your drop center drive? I feel like even a slight bulge could really screw things up.
First off, I’d like to commemorate Team 62 on an awesome robot.
Also, For the benefit of the VEX public, I’d like to mention that you do not need an almighty, all-powerful robot to get a score upwards of 50 in driver skills and to do well in your matches. You simply just need a few things, all in which you can control, some major ones being:
A set strategy for each match, almost like a playbook in your head
Great timing (for the claw class of robots) and great use of the field.
Methodical, precise movements; Drive on purpose, not in autopilot. Thats what auton is for ![]()
And an understanding of the properties and physics of the game elements while in motion. IE: when stars/ cubes bounce off a pile of stars/ cubes on the other side of the field:
If you truly indulge yourself a couple hours’ time learning this stuff and going over it with your team and future alliances, you will definitely be better off in the long run.
(Side note: certainly doesnt hurt to have a functional, reliable, efficient robot.)
Hope this helps some of you guys who’re looking for some advice!
Which team had that epic autonomous? I thought it was over after that, but I guess I was wrong.
I believe that is 6007
Hang: https://www.youtube.com/watch?v=ah4qnzzPwsY
No, our robot is so light it doesn’t really matter.
+1 to this. The main thing here is getting used to how the game objects behave. This really helped me with knocking over the stars from the fence.
The team with the good auton is also from my school, 6007.
Responded. Now I want a new backpack
Okay, I have built a very minimal base and put up my C-channels for the tower… Granted those C-channels (on the tower only) are steel but it’s already 8.4 pounds and I haven’t even added the whole arm, most of the motors, the pneumatics, the cortex, and the batteries. I’m struggling to understand how your robot can be that light.
I guess steel is just really heavy? Too bad that’s all I have to work with there…
Picture of what I weighed for those interested:
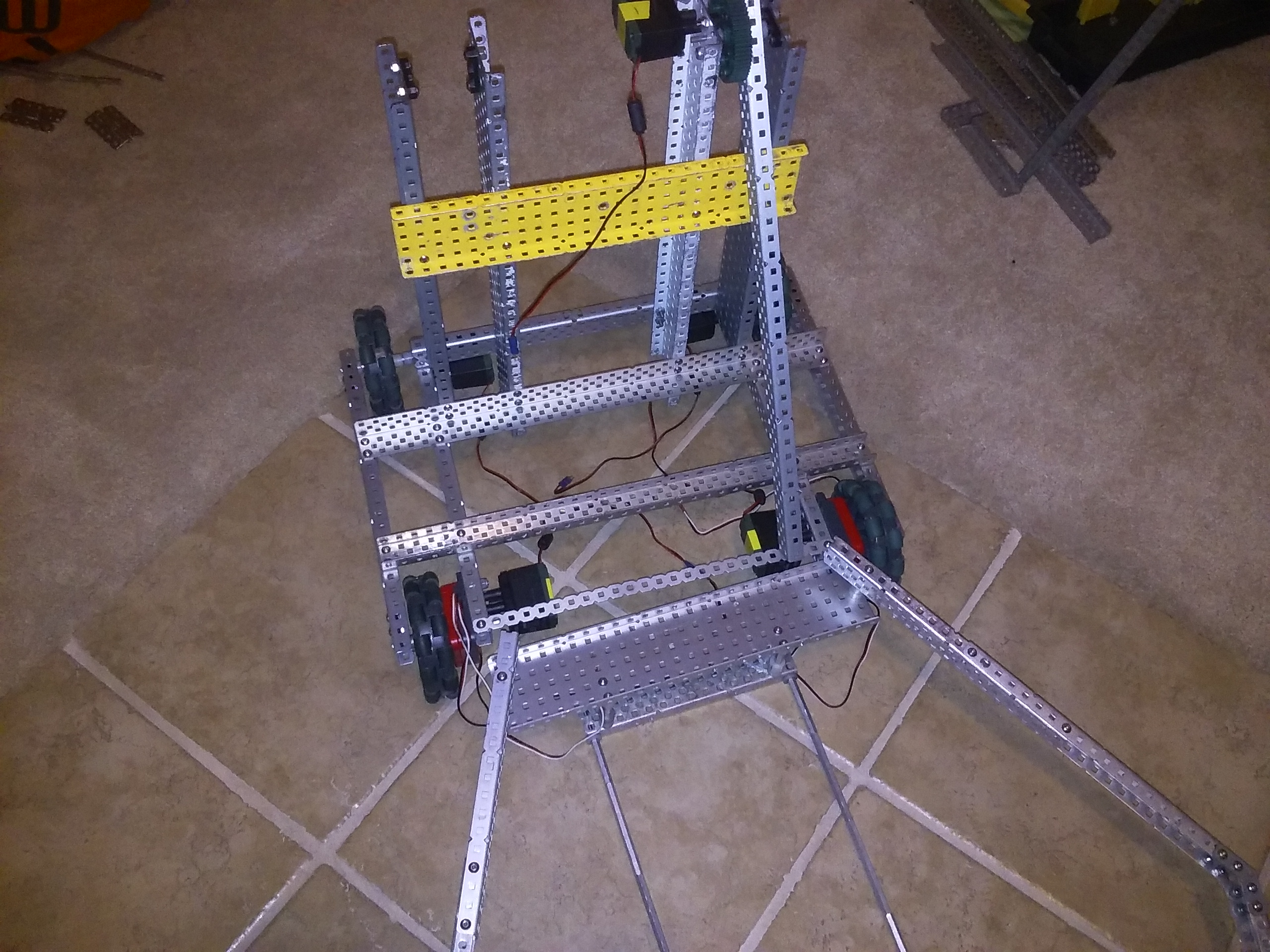
You just gotta use aluminum and not that much of it. And no bearing flats. And nylon screws
The main thing here is the steel C-channels. I’ve kept everything as minimal as I felt I could while still keeping it structurally sound.
And I didn’t use bearing flats where I had motors to hold up its side on the base.
Just dont use toss up 127C metal and youre set
But what if that’s the source of my power?
@Cameron Schiller What is the max weight the robot can carry?