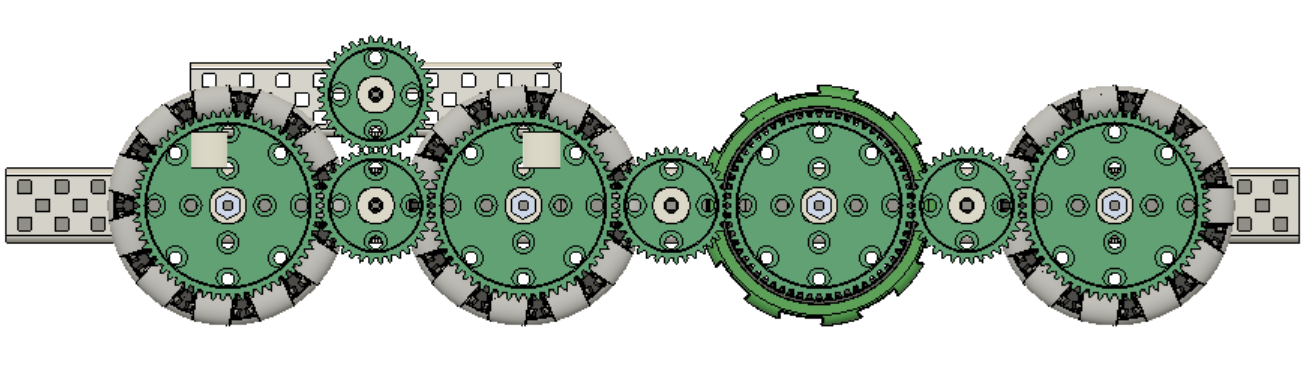
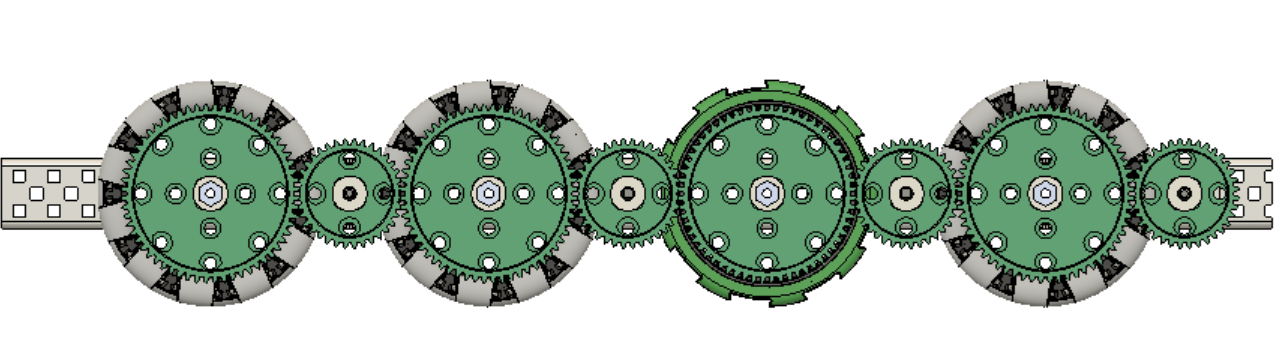
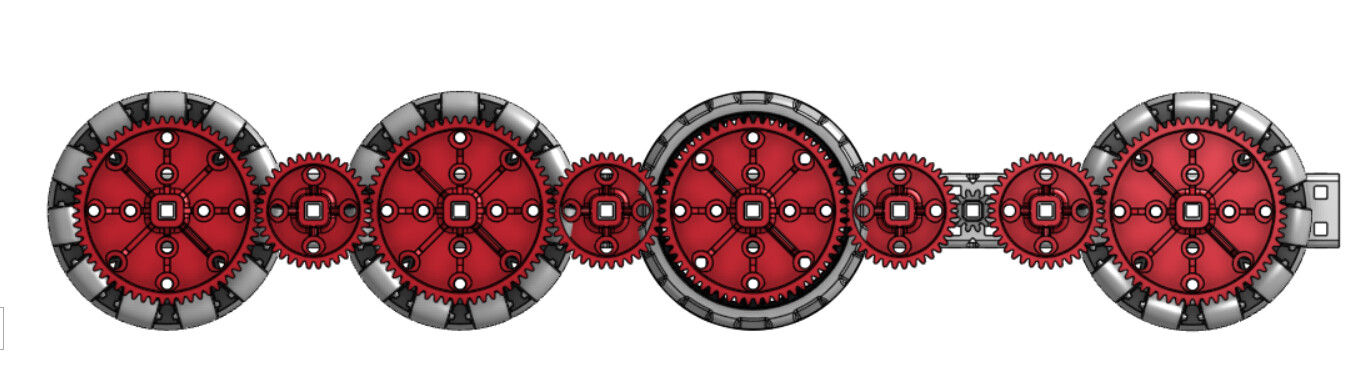
I am planning to build a 360 RPM, 36:60, 8x3.25" wheel, with 8 motors. However, I do not want to stack the motors for the 7th and 8th motors like Picture 1. That is why I am putting the 4th 36t gear with the 7th and 8th motor inline and sticking out. (Picture 2)
I do not know if there is any problem with this gear sticking out, but I have some concern.
First, there can we a problem with weight distribution and tipping problem. The gear is sticking out 1.2 inch, with front brace with will be ~2 inches sticking out. This part can cause imbalance later when build on.
Second, power delivery capability of this gear. Picture 1 has the 4th 36t connect to another 36t that is transferring the power to 2x60t. If the 4th 36t is like Picture 2 it is only powering 1x60t and might cause some power delivery issue.
Third, problem with turning. Power delivery, weight distribution, and others factor can affect the drivetrain turning capability.
Last, someone I know also mentioned “that’s just a weird cantilever and will mess up your approach/departure angle” which I do not understand what they meant.
I hope that masters in the VEX forums can assist me with the problem. Please tell me if it have these concerns, problems not considers, if stacking is a better option, or others drivetrain gearing recommendation.
This is for a 24" robots, but I want it to not exceed 19". It has to has 8 motors and the motors and gear have to be inline and not stack up to make it easy for bracing and mounting up top the drivetrain. 3.25" or 2.75" wheel is fine. Should be as fast or faster than this 360RPM, 36:60, 61.3 in/sec. Should not use 72T on a 3.25" gear. The gear should not be staggered like a 36:48t drive which cause gear slipping in high torque.
I had looked at this post for reference Drivetrain Catalog
Picture 1 (STACKED)
Picture 2 (INLINE)
Thank you so much for your help.
May I ask what made you choose to go for 8 motors over 6 or even 4 motors? Wouldn’t you be losing valuable motors for other systems?
For us, 8 motors is the option that provides enough power for a drivetrain. Especially a 24” robot definitely needs 8 motors to be viable. In addition, as we are competing in VEXU, there is no motors limit, and we have never use all the ports.
stacking a gear will not have any problems its farley common practice. just make sure everythign is well supported on both sides with proper bracing and that there is good friction. also the inline conig looks really ugly and its kinda fat. stakced is definitley better. just make sure like i said its supported on both sides
Your advice is very valuable suggesting stacking drive. We totally understand the suggestion since we had used the stacking drive before.
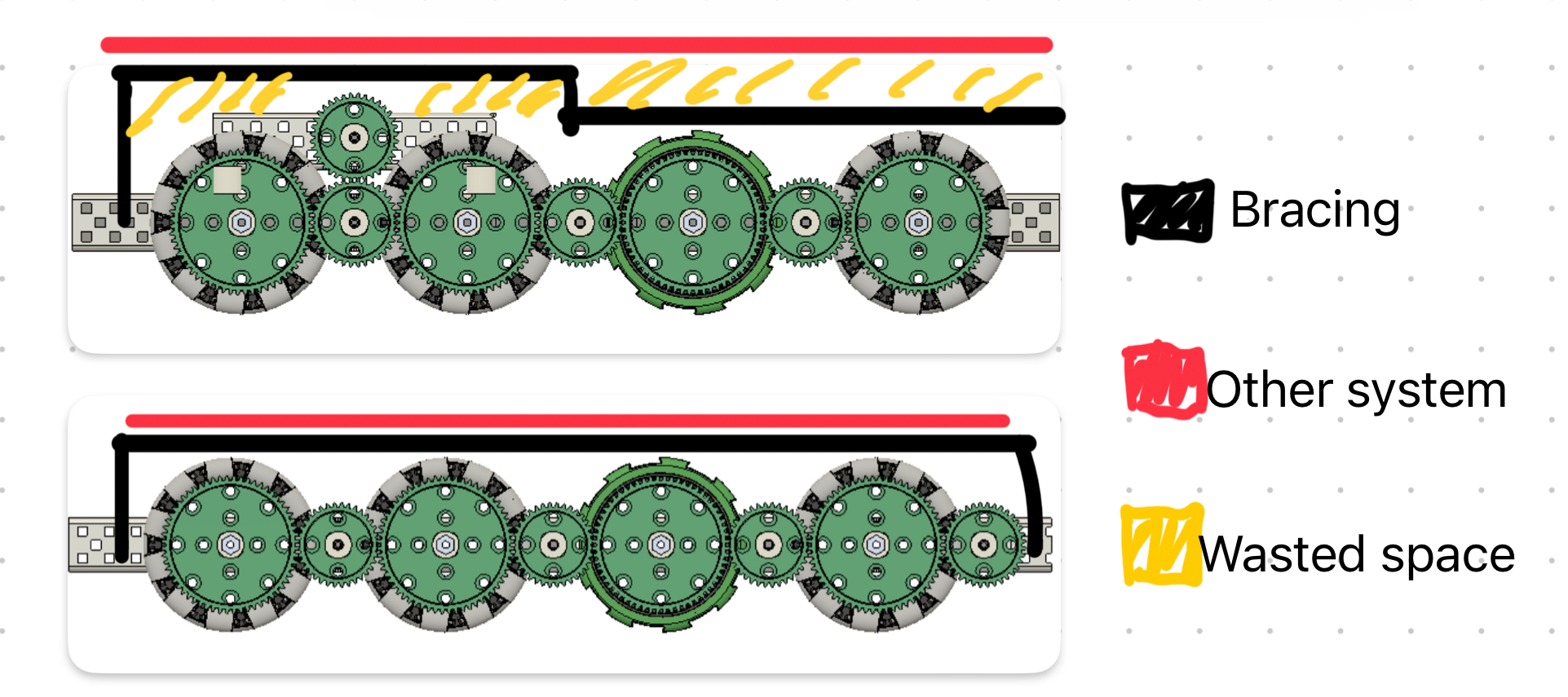
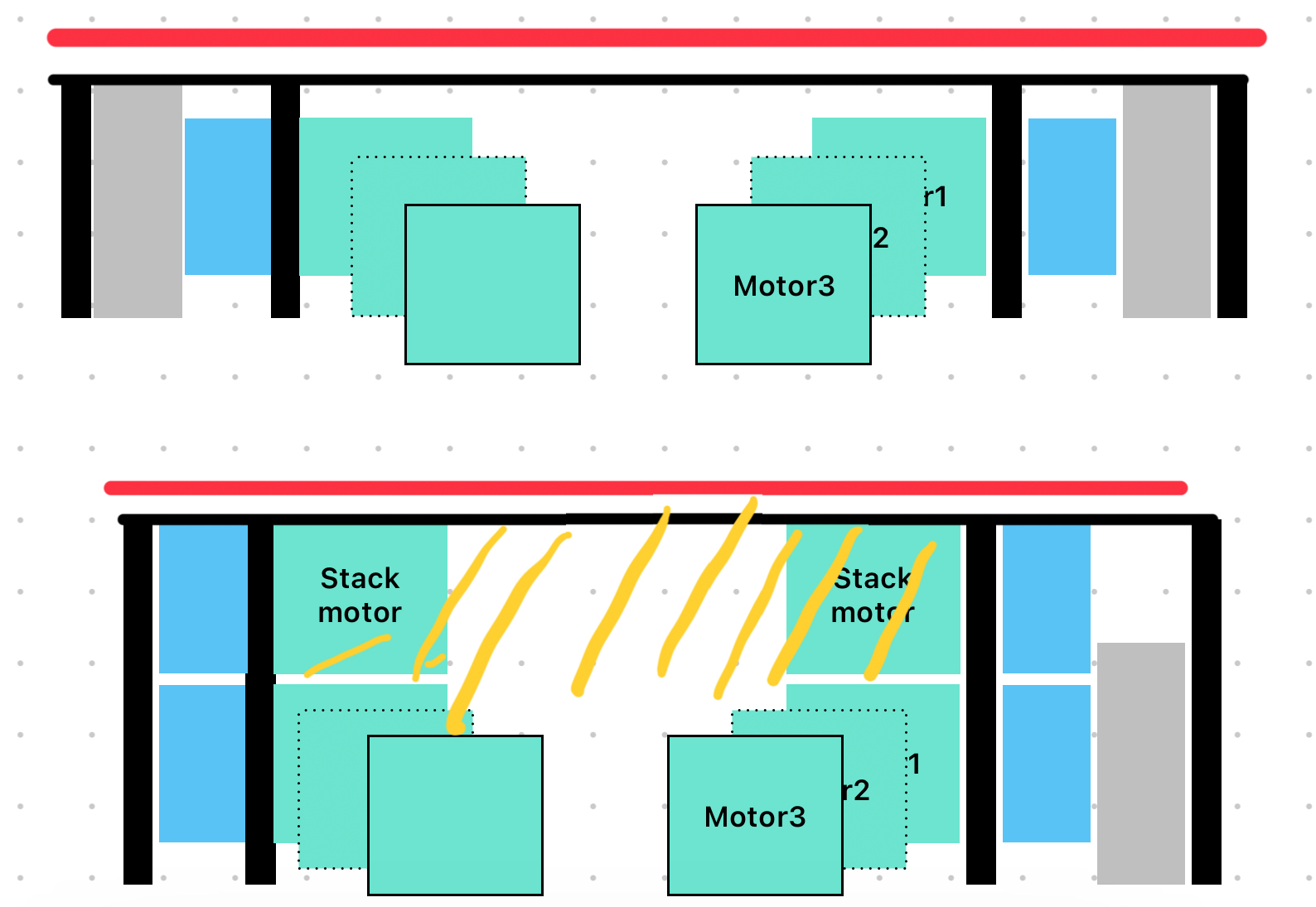
However, we want to have the inline option rather than the stacking because we want a flat bracing up top the drive panel. If we use stacking gear, the bracing has to bump up at the stacking gear. The bump will make it really hard to mount something above the drive panel. For example, you can not mount a long C-Channel above it without wasting plenty of space. Additionally, in between the motors of the 2 side of a drivetrain panel is a small space. You can disregard that small space with inline gear by building above all of the motors. However, with stacking motors, you can not build above the motors without wasting plenty of space above the motors that is not stack. You can say that we can put system above those non stack motors, but I rather have total free space to work with. Here are pictures to explain it
Picture 1 (Side view):
Picture 2 (Front view):
I admit this may not be the most orthodox option, andI personally haven’t seen or tested this, but you could mount a group in the middle with a small idler gear like this:
A couple problems here:
Power delivery, weight distribution, and others factor can affect the drivetrain turning capability.
The differences between your two options won’t meanigfully affect the turning capability
will mess up your approach/departure angle
Yes, the approach/departure angle is the maximum incline your drive can climb. Mounting the motor inline will decrease this angle, making it much easier for low hanging structure to scrape the floor when slightly tipped (i.e. stopping abruptly)
The gear should not be staggered like a 36:48t drive which cause gear slipping in high torque.
Staggered gearing doesn’t increase gear slipping. Gear slipping is not a big concern in vex drivetrains. With good build quality, the motors will stall long before that happens.
As for concerns with wasted space if you use a motor stack, there are a lot of ways to design something to utilize that space. Of course this depends on the overall design but I would think about putting mogo mech pistons, battery, pneumatic reservoir, or even just a nice low cg spot to put solenoids. If you want inspiration, I’d suggest checking at old reveals with stacked gearing. If you’ve set 8 motor drive as a requirement, it’s going to be very hard to create a viable design with inline motors without using direct drive like 9364H did in over under.
Thank you for the great idea. I have seen this worked before. However, the traction wheel configuration is very far from the Center of Gravity which will make it really bad for turning.
Thank you for explaining the power delivery and approach/ departure angle.
I did not think of the motor stalling before the gear slip. It that is the case, then the gear will not slip even with only 75% of the teeth height meshing. The 36:48 with 5x2.75" wheels is now a viable option. However, I do not know how to mount the gear onto the 2.75" wheel.
Direct drive with 600RPM is viable for 9364H because that is a very light weight robot that would not need much torque. I do not think direct drive is viable for a 18-20" robot.
You are right that we can design system to fit in the space between, but there are some concern. First, design things inside the space is not so fun with the space constraint. Second, I really want a flat platform up top for easy integration and system testing for a big team.
Oh I forgot about the traction wheel.
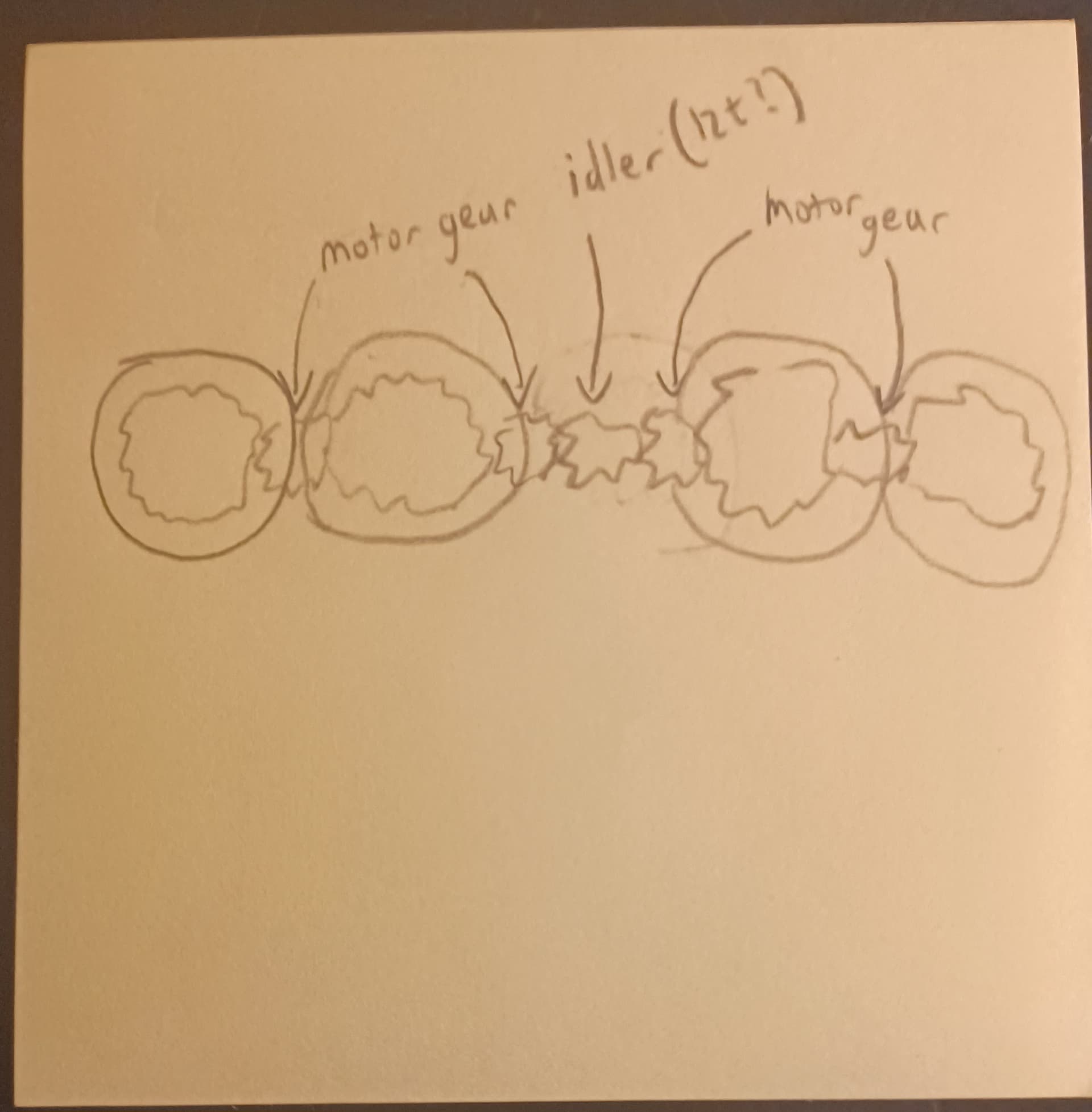
Well, getting even more unorthodox, how about this:
(Motors mounted on the 36t gears, and the 12t being an idler. Overall length of 17 inches)
I’m not sure if this will cause the omni-wheels some problems, but it seems that it would have the added benefit of pushing the traction wheel more towards the center of the drivetrain (the center being about 1 left of the traction wheel center rather than 3 holes).
Using any idler gear is a bad idea, a 12t idler is worse. This just adds more friction to the entire drivetrain as more axle rub inside bearings. A 12t idler gear would amplify this issue as it would be rubbing 3x as much since it is spinning 3x as fast. If you’re dead set on using an idler gear offset another 36t. gear.
2 center traction wheels, while not ideal, work just fine as barcbots have demonstrated here: https://youtu.be/dzPbTdkABBM?si=c6exHqJCa2DDa-Ek
You just screw a 48t gear to the 2.75" wheel
This is precisely what CAD excels at. This is just a tradeoff between a simpler 8m gearing and a “flat platform.” The size of your team shouldn’t affect how competitive your drivetrain can be as integration is figured out on CAD. Otherwise you’re not taking advantage of the main benefit of CAD.