I have designed a timing competition switch for last season’s Make It Real Challenge. It clips onto the controller and can enable and disable the robot with the press of a button, allowing the user to have greater control of the robot. On top of that, it automatically disables the robot after the correct length of time has passed, closly simulating a competition enviroment and allowing teams to practice all forms of timed competion.
While I didn’t win the online Challenge, the teams in my organization have used it to great effect, and I brought a small batch of them to Vex Worlds. Many teams and Mentors there were intersted in it, so I published the design. More information available on my Github.
DM me if you have any questions, or further interested in the gadget
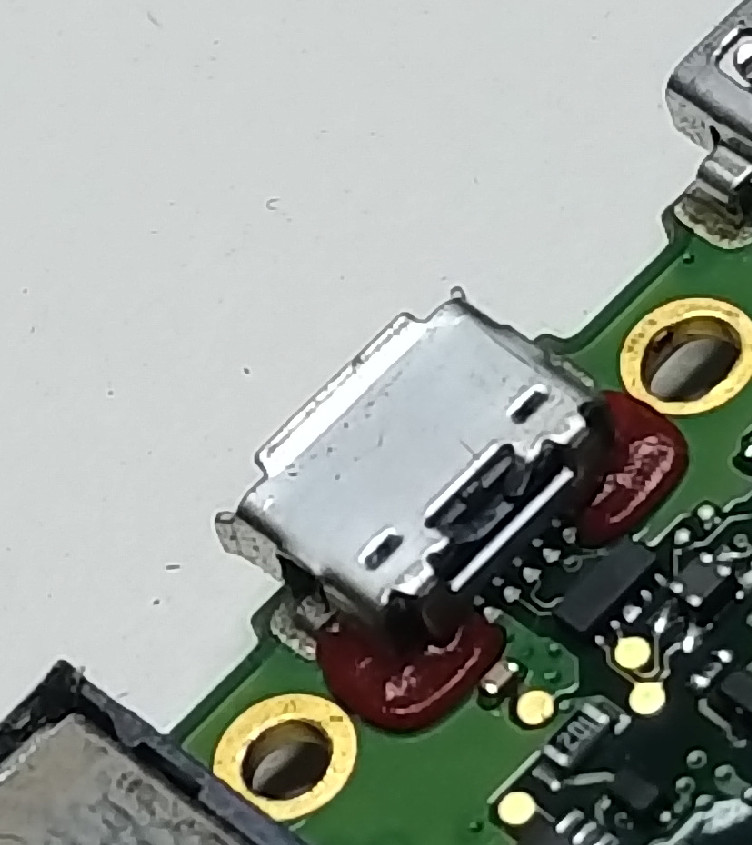
This is how you fix any PCB connections. A dab of UV-curing epoxy or something like that around corners of USB connectors and the reliability will greatly improve.
Below is an example of a similarly reinforced USB Micro-B connector on a consumer product (tablet) from 2012 or so):
It is combining the benefits of the competition switch (more controllable and easy to switch from driver to auto) with the benefit of the times run feature (timed runs to simulate matches)
Great question, thank you.
The built in timer has 5 disadvantages, compared to my switch.
The controller has no allowance for running a pre-auton longer than 3 seconds. I have always designed auton selection to be done via the screen on the robot, since it gives more information to the user and can enable a great variety of autons to be created. This cannot be done with the built in switch, since you don’t have time to select it. My switch is completly user controlled, so you can do what ever you need to do between the program starting and the timer starting.
The competition mode will run driver right after the auton. This means there is no time to evaluate the auton, and, in the case that you are testing just the auton, you have to spend time canceling out the competiton mode between runs. Since they are two separete things on my switch, you decide what happens and when.
The skills and competition modes take time to be disabled, so you can’t stop the robot immediately, because you have to press and hold the button. My switch can be disabled instantly with the press of a button.
The competition and timed run modes kill the program right after it finishes, so if you output any form of telemetry to the screen, you don’t have time to check what happened to it. Since my switch just disables the robot after the time is up, this is not an issue.
The controller has no ability to just run an auton for an indefinite amount of time. This can be beneficial for debugging the skills program as well as for autons which are used to test API capabilites. (One of the first things I always ran on a new robot was my “Square Dance” which drove the robot around a 2ft by 2ft square to test if my sensors were correctly calibrated. This was rather short, but for a more extensive test, an indefinite auton would be helpful.) On my switch, an untimed auton can be run by long-pressing the button when the slider is in the middle.
When I was talking about this at vex worlds, I fould that a lot of mentors were interested in building this with their teams as a learning experience. It allows kids to learn soldering, and because of the open documentation, they could also try and understand how it works. Soldering a microchip by hand is a bit of a hassle, so teams could try building it with this devkit, which I used for prototyping, though be careful not to plug it into the controller and USB at the same time, since there is a voltage mismatch.
Matching the designed formfactor requires the use of the designed PCB, which is impractical in low numbers, so If you are interested in getting one, DM me, I still have some left from worlds.
That would be great to know,
also @Puzzlers100 if your not going to worlds and have any of the PCB’s left, do you have an account on the other robotics forum so I could DM you there about getting one.
I’d love a few if you’re interested in giving them out or selling them. What’s the best way to contact you? I know emails get removed quick from posts but @DRow or another mod, if you could share mine with @Puzzlers100 that would be amazing.
As a relevant side note, a good portion of the traffic that occurs on this forums would benefit from being able to share outside private messaging information. Possibly implementing an option for us to share our information on a user by user basis would be great. Safety risks would be significantly small still and it would be great for conveniences sake.
Or, just bring back DM’s. Not sure why they got taken down. Seems like it would be a lot of work to check those plus mainstream forum posts before they actually are posted, but one can hope it remains possible.
If you want to contact me about purchasing one, my github has contact information, or you can DM me on the other forum. It’s unfortunate that DMs were disabled here.