Hello!! I’m not an actual programmer, I’m just able to program for my school’s team, and I’ve been struggling to program the autonomous for my robot in block code? I’ve been scared to reach out because apparently block code is looked down upon… I just really want some advice with how to program autonomous for a 6 motor drivetrain on block code, and if I’m able to incorporate c++ into my block code. Thanks!
Block code is perfectly fine to use. In face, with the recent addition of the switch blocks, I think block code is a great starting tool. Many great teams use/used block code at one time.
I don’t do VRC yet, so I would ask some other teams about this.
The switch blocks will allow you to do this.
VEXcode Switch Blocks - VEX Robotics
(quick question, are you on team 7282K AutoFlashes: Kachow?)
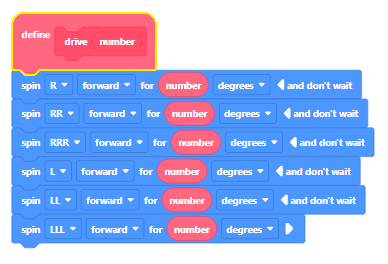
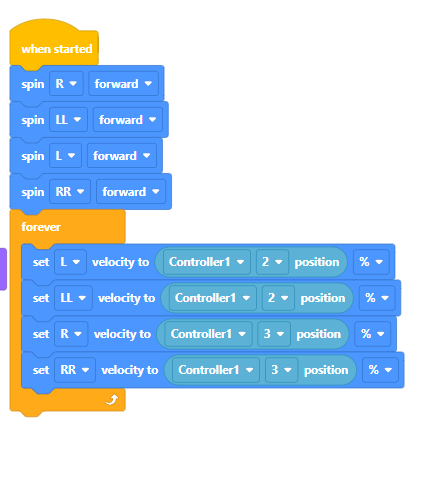
Set motor velocity to controller for each set of motors

Thank you!!! My driver control is completely fine atm but I’ll test this out later… I just need help programming the autonomous if that makes sense :3 Do you have any examples of that? Because it’s not like the drivetrain command that Vexcode already has like moving a certain distance, like 6 motors make it super complicated for me to just program it to move straight or turn on its own (if that makes sense)
Haha I am not on that team… my username is just a coincidence ;] but thank you for reassuring me… I was in this one server for vex robotics and someone sent their block code and they got looked down upon so it made me worry…
There are two ways to do this. Using the built in drive control or making your own control. For beginners, the built in is usually the way to go as it is fairly consistent if you input the correct values. On the other hand, custom control is much more consistent since you can tune the parameters yourself and better for longer autons. Reach out and decide which one you like the best and we will help