I’m wanting to do a non-vex sanctioned event that is just for fun but is a fundraiser for my team. All IQ teams will be invited. I want to use the kill switch system and make it a Battle Bot event. Has anyone had experience with this? I’m brainstorming rules. No bots will be injured in the conducting of this event. The benefits would be that you are required to program sensors and it’s another way (late in the season) to get in some event / build practice.
There is no way that I know of, or has been released, to control the robot from a central location. Turning the controller off will turn the robot off
Do you mean that you want a certain target on the robot that when hit, stops the robot? That would be quite straightforward if so. If you want to be able to remotely kill the robots, then definitely not easy.
the iq controller has Ethernet cable right so could u use a edr competition stitch maybe
we did this a few years ago for a fundraiser and it worked fine without one we had the highschoolers work with the 4th and 5th graders who did the event and it was great
if u end up doing this plz post a vevo
No, the software does not interact with the ethernet port…
could u change it???
I’m not sure what you mean, sorry.
like trick the compitition switch into thinkng that it is working on edr robots
It’s not the switch that is the issue, it’s the fact that the port is a tether port that wouldn’t help solve this problem at all.
f you want to spice up the competition, and don’t mind potentially breaking a VEX IQ parts, you could look at altered rules:
- Use a V5 Robot Brain, Battery, and Smart Motors (and associated cables)
- Use only VIQC-legal structural elements, with the only exception that 2x screws are allowed to mount each V5 Smart Motor onto the IQ structure.
If you do this, be sure to take off the outer mounting cap on each V5 Smart Motor, flip the mounting standoffs 180° so the VEX EDR alignment nubs face inwards, then reattach the cap. These alignment nubs will damage IQ parts if the motor is screwed onto them.

Sounds like you’ve done this before? ![]()
If your doing this add a weight limit and say pnumatics is allowed ![]() flipping time
flipping time
This was actually a design constraint when we were working on V5 - if we could easily make it compatible with VEX IQ structure, make it so. This is why some of the V5 mounting interfaces are modular or use VEX IQ snap geometry, like the flanges on the V5 Brain.
It comes from the same design philosophy that I followed when designing the VEX IQ structural building system in 2011/2012. I intentionally kept the same 12.7 mm / 1/2" hole spacing, 1/8" shaft size, and the same Ø4.20 mm / ~0.166" bearing hole size from the metal-based VEX building system, rather than switch over to a new nominal metric pitch grid.
If everything is cross-compatible and is designed around standardized pitch-based interfaces, it opens up a lot more future use-case possibilities. ![]()
It could be like you have to add a limit switch to the but, and the other bot has to press it and it’ll stop working. The idea is to attack but to defend yourself too
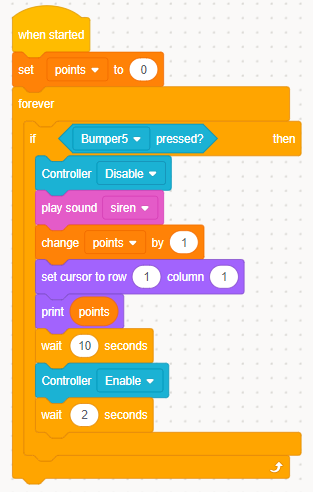
You could just require them to add this to their code. It would disable the bot for 10 seconds and count up how many times they got hit. Also would give them 2 seconds to get away after coming back alive.