The blockly is really easy to use, and works well. But with the release of vexcode blocks, I’m not sure if it’s still the better option.
The ability to store code online is very helpful though
If you are working with others, VEXcode (which is C++) is a good choice. VCS is not supported anymore, and PROS might be tougher to get everyone started with.
I know that a lot of people say PROS is extremely difficult for beginners, but I disagree. I think that if someone doesn’t know C++ or C, they will have the same level of difficulty for both VEXCode, PROS, and RobotMesh. PROS will simply allow you to go the furthest because it is the most flexible.
The only large exception is the display in PROS. That is several levels more difficult.
Regardless, I recommend PROS C++ even if you are all beginners if you are committed and have an experienced mentor to ask questions.
Thank you for the detailed response! I’ll download PROS tonight and compare it against my VEXcode, I think with enough experience, I should be able to get over the display for PROS if it is a challenge. If it is too much, teaching everyone else in VEXcode shouldn’t be too bad.
Thanks again, this really helps a lot, especially for a new team.
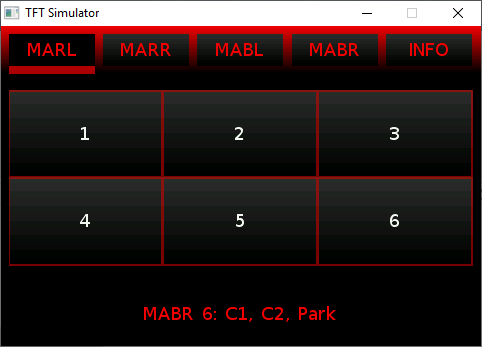
A lot of people like to make auton selectors and such on the screen. I also used it to debug our code sometimes by printing values of certain variables out to the screen. There are definitely alternatives to that, but it’s often helpful.
Exactly what @Electrobotz said. LVGL is written in C, which might throw off new users. It’s definitely not very important for a robot to function, but it’s an additional tool you have at your disposable to do cool things (even runs DOOM on :P).
Vexcode C++ seems to be a solid way to start and once you start maybe over the summer or during a break try to upgrade and learn PROs which is also a good programming language, but for more advanced things.
It’s not too difficult to make an auton selector with multiple choices per color (red/blue) per side (left/right). this was started from the example demo code that used tabs and button matrix.
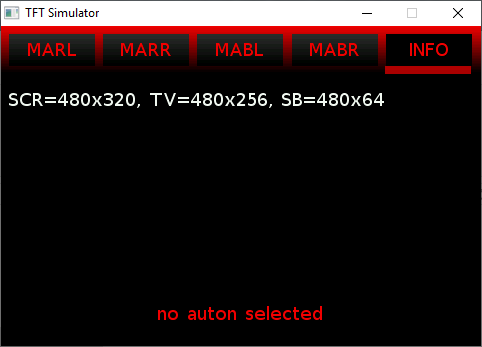
info tab
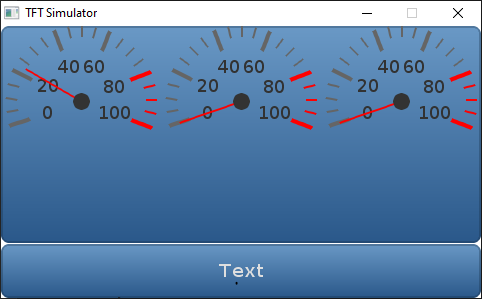
gauges test (more refined in example code)