There’s been lots of discussion about the four flavors that we have for C programming APIs. I think the differences are being over emphasized for the beginning programmer as they are more similar than different when used for simple student programs. Here is a small comparison and a reference comparing the APIs.
This program in ROBOTC (tank drive with two motors)
task usercontrol()
{
while (true) {
motor port1 ] = vexRT Ch3 ];
motor port10 ] = vexRT Ch2 ];
// Don't hog cpu
wait1Msec(25);
}
}Is equivalent to this code in EasyC (although EasyC has a function to do this in a slightly simpler way).
void OperatorControl ( unsigned long ulTime )
{
while ( 1 ) // Insert Your RC Code Below
{
SetMotor ( 1 , GetJoystickAnalog( 1, 3 ) );
SetMotor ( 10 , GetJoystickAnalog( 1, 2 ) );
// Don't hog cpu
Wait ( 25 ) ;
}
}Looks like this in PROS
void operatorControl() {
while (1) {
motorSet( 1, joystickGetAnalog( 1, 3 ));
motorSet( 10, joystickGetAnalog( 1, 2 ));
// Don;t hog cpu
taskDelay(20);
}
}and finally like this in ConVEX.
msg_t
vexOperator( void *arg )
{
// Register and name the task
vexTaskRegister("operator");
// Run until asked to terminate
while (1) {
vexMotorSet( kVexMotor_1, vexControllerGet( Ch3 ) );
vexMotorSet( kVexMotor_10, vexControllerGet( Ch2 ) );
// Don't hog cpu
vexSleep( 25 );
}
return (msg_t)0;
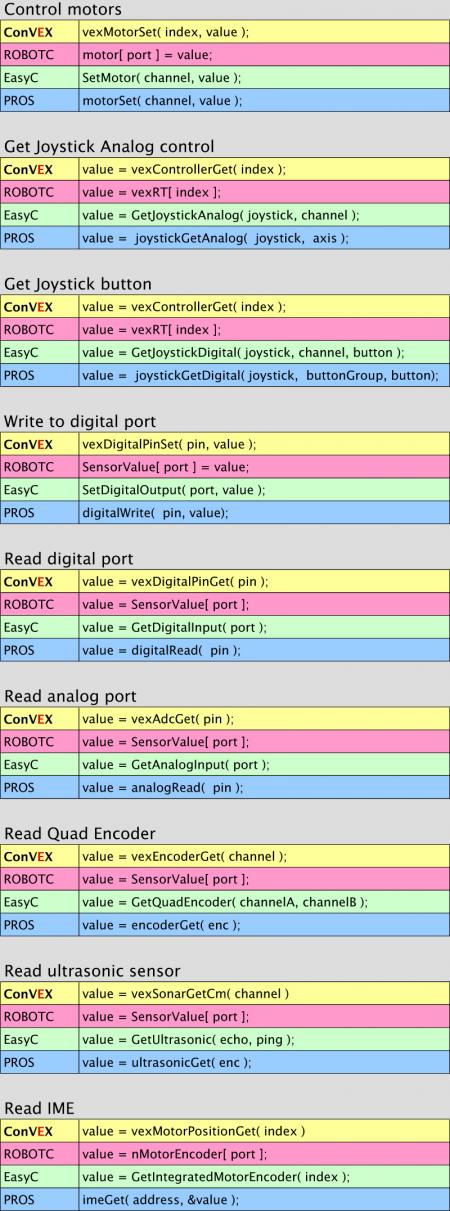
}Here is a comparison of the basic API functions.