Can VEXIQ communicate with other devices through methods such as UART or IIC?I hope VEXIQ can read the sensor data I made myself. Is there any way or idea to achieve this operation?
This may be of interest
IQ Generation 2 can also communicate using asynchronous communication on some ports (ie.uart at logic levels)
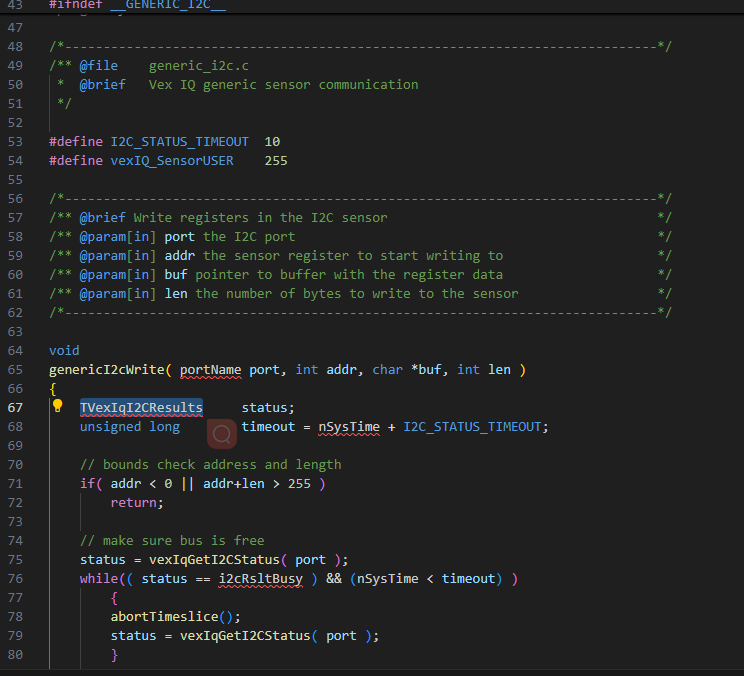
Thank you very much for your reply, and I am very sorry that I seem to have been a little verbose. I seem to have some new discoveries, and here IIC and UART related code, because it is encapsulated into a library file, through the function return value definition and input parameter definition, I can guess what is probably doing, but I still do not know where to find the details of these functions?

The code comes from:
C:\Users\pc\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\sdk\cpp\IQ2\IQ2_20231003_10_00_00\vexiq2\include\iq2_api.h
Great project, that’s a great start, but I’ve noticed that the project seems to be using ROBOTC as a programming tool, which doesn’t seem to be officially supported anymore, and the prevailing approach now is: VSCODE or VEXcode IQ, but I did not find the IIC-related API code in the C++ support page [Comprehensive Guide to C++ on VEX IQ (2nd Generation) — VEXcode Documentation](https://VEX IQ (2nd gen) C++) , and VSCODE seems to be unable to directly fail to? Did I miss anything?
Sure, it’s 11 years old, but concepts are the same.
Yea, you shouldn’t use those. There is a C++ class for i2c, uart would just use stdio. Not near a computer for a few days so cont help much more right now.
I successfully read some data, very simple, much simpler than I thought, even do not need to simulate a VEXIQ sensor, only need to directly read the IIC bus.
Use any controller as long as it can be used as an iic_slave.
I will continue to share with you if there are other developments.
Thank you. I wish you a happy day.
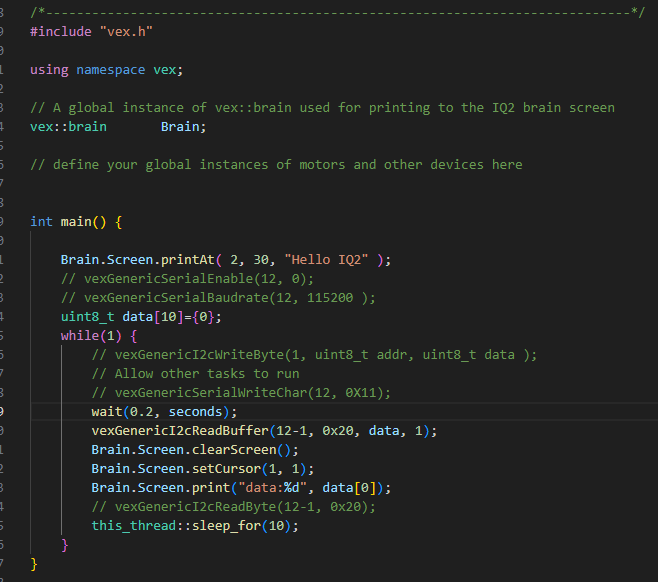

you can use the vex::generic class and avoid the low level C calls if you want. For raw IO use.
/*--------------------------------------------------------------------*/
//
// The following methods are for communication with generic devices
// that do not conform to the IQ sensor reference spec and have an I2C
// address that does not conflict with other sensors on the same bus.
// raw sensors should not use I2C addresses that may be assigned to IQ
// devices if sharing the bus with them.
// (8 bit addresses)
// 0x60
// 0x20, 0x22, 0x24
/*--------------------------------------------------------------------*/
/**
* @brief Read bytes from the device.
* @param addr the 7 bit i2C address of the device
* @param pBytes pointer to buffer to read into
* @param nLength number of bytes to read
* @return number of bytes read, < 0 if error
*/
int32_t readRaw( uint8_t addr, uint8_t *pBytes, uint8_t nLength );
/**
* @brief Write bytes to the device.
* @param addr the 7 bit i2C address of the device
* @param pBytes pointer to buffer with data
* @param nLength number of bytes to write
* @return number of bytes written, < 0 if error
*/
int32_t writeRaw( uint8_t addr, uint8_t *pBytes, uint8_t nLength );
/**
* @brief Write bytes to the device.
* @param addr the 7 bit i2C address of the device
* @param pBytes pointer to buffer with tx data
* @param nLength number of bytes to write
* @param pRxBytes pointer to buffer with rx data
* @param nRxLength number of bytes to read
* @return number of bytes read, < 0 if error
*/
int32_t writeReadRaw( uint8_t addr, uint8_t *pBytes, uint8_t nLength, uint8_t *pRxBytes, uint8_t nRxLength );