Due to the lower mechanical power of VEX IQ robots*, a lot of IQ mechanisms are more fault tolerant than they are in V5 or FRC robots. For most use cases in VEX IQ, you can have a successful mechanism with only ~90° of chain wrap, while I would never want to use less than ~135° of chain wrap in FRC.
*There is an order of magnitude difference in mechanical power during each jump from IQ → V5 → FRC.
Interesting, thanks for the insight! I had assumed it would work the other way around; needing tighter wrap angle to make up for the lower tolerances in plastic vex iq chain compared to standard metal ASNI chain.
Looks like the main issue is just tension after all
oh well
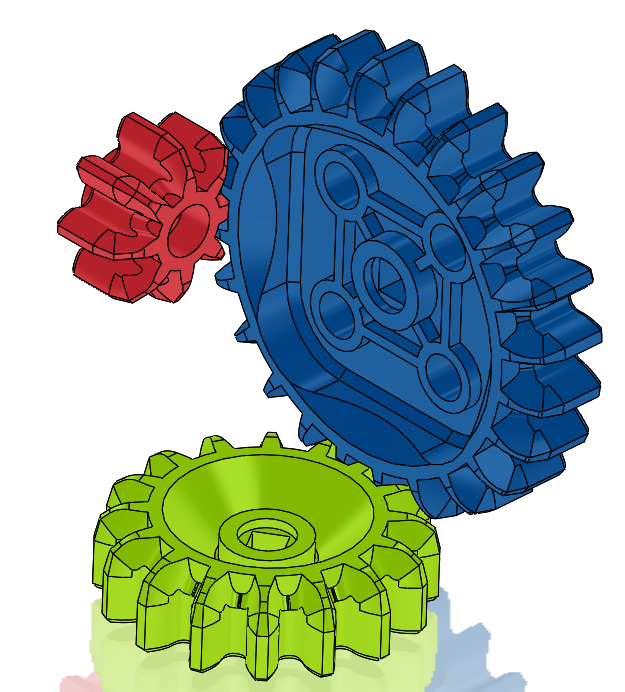
Another example of lower power VEX GO / IQ robots being more fault tolerant are the fact that we can make universal Hybrid Gears work at the GO / IQ scale.
Hybrid Gears are a combination spur gear and bevel gear that we first released in the new VEX GO kits. What makes these unique, is that you can mesh any size Hybrid Gear with any other Hybrid Gear in both spur and bevel use cases.
This universality to these bevel gears will likely set off warning bells to anyone who has designed mechanisms at the V5 or FRC scale. In normal usage, bevel gears must be designed as a specific mated pair that is tied to a specific gear ratio. A 24T bevel gear designed for a 1:1 ratio cannot be subbed into a 1:2 ratio bevel gear set. Even if you forced it into the correct position, it’ll quickly grind the gear teeth into dust due to mismatched tooth profiles.
While V5 has some older mated bevel gear pairs, we did not want this level of complexity at the GO / IQ scale.
Thus, at the GO / IQ scale, the low mechanical power that we are looking to transfer means that we do not need a perfect bevel gear tooth profile, allowing us to use a heavily modified profile to enable any Hybrid Gear to mesh with any other Hybrid Gear of the same diametral pitch.
More universally, this is reflected that every time you “graduate” into a higher VEX product line, you’ll need to learn a lot more STEM skills and engineering nuance to design, build, and program successful robots.
Not sure where you are for width limit, but If you can, I would go back to original design and connect front and back wheels with a second 1:1 chain system between wheels and 2x beam.
Torque. if you have a large gear driving a small gear, it will decrease force and increase speed, and the other way around will increase force and decrease speed. for a good torque/speed balance, use a 3:2 ratio for heavier bots around the 2-3 kg range, and 2:1 gear ratios for weights less than that for maximum efficiency. for bots even heavier, 4 kg or more, probably use either 1:1 or 2:3, since any other ratio and the wheels will probably not turn.