So I just came up with this idea of a chain tensioner that constantly applies some force to keep the chain tight and will adjust itself depending on the stresses on the chain. Upon further research I realized this has been done in the past, but has not been used popularly. Here is the concept I built.
What do you guys think, would this be better than a fixed tensioner, or is it too much work for what it is worth.
I think that’s a pretty neat idea. It definitely has much less friction that the common method of tensioning chain by putting a standoff or something similar that rubs on the chain.
It’s definitely a good idea, and something that I can see a lot of teams using or wanting to use, but personally I just don’t see the benefit of using a chain tensioner like this - when we build our drives, we space out everything so that the tension is already good, and the stationary tensioners that we do use are sufficient to keep the chain where it needs to be - adding in more complex moving parts such as this could change the way that the drive would react under different loads - and then I’m asking the question - what is the benefit of this over a regular tensioner? Yes, we need tension to keep the chain taught, but we never needed the chain to be super taught - in fact, there needs to be some amount of slack in the chain for there to be as little friction as possible.
Is there an easy way to set up sprocket lengths so that the chain doesn’t need a tensioner? I find that I need some tension for most of my chain loops.
Yes of course you still need to keep slack, especially when operating under higher loads to leave some room for (error)? and I have tried to keep that in mind for this.
If you keep with the hole spacing of the C-channels and have your chain run parallel to the C-channel you would only need 2 chain links for each hole apart your sprockets are plus half the toothing on each of your sprockets plus whatever slack you need (most likely 1 extra chain link)
Of course there are many situations when using chain for the pure benefit of mounting versatility where this would not apply. But the holes you would count for the C-channel above to gauge the length of the chain you could switch this out for .5 inches (each hole you would have been counting you are now counting for how many .5 inches are between your chain plus whatever remainder)
I’m not very well versed in building, but why do you need tension on the chain instead of just making the chains tight on the two sprockets connected to the wheels?
If the chain is too tight on the sprockets it will create a ton of friction, but if it is too loose it creates unwanted problems. So people will use chain tensioners to tension the intentional slack on their chain just enough to not cause problems.
Trial and Error, mostly. I think on our drive for 2381X we tried mounting the wheels around 7 different times before we got them just the way we wanted.
Each chain run will have an “optimal” tension, where it’s not too tight creating unwanted friction, and not too loose where it’s slipping, skipping, or coming off. Ideally, you would build with your two sprockets and the chain already at this tension. However, it’s often impractical to do so, so you introduce a chain tensioner to help bring the chain to that tension.
In other cases, you need the chain to have more contact with a sprocket than it might otherwise get, and that’s why you would also use a chain tensioner. Below is an extreme example:
I tried white nylon spacers to tension my intake. It actually added more friction than the loose(r) chain had alone. I don’t have any pics because this was a pretty cut and dry testing phase, but a tensioner isn’t always used.
I feel like I might build my own version of that adaptable tensioner at some point just for fun, and to add an extra design note when talking to other teams or judges. It’s cool, but, as others have said, probably not worth the extra design and building effort. (But it is cool!)
I would be surprised if a tensioner didn’t add friction; less contact will always be smoother than more. However, chain tensioners are nearly always necessary (exceptions may include things like intakes) in order to accurately link the motor to a mechanism with minimal slop, especially now that V5’s IMEs are so convenient.
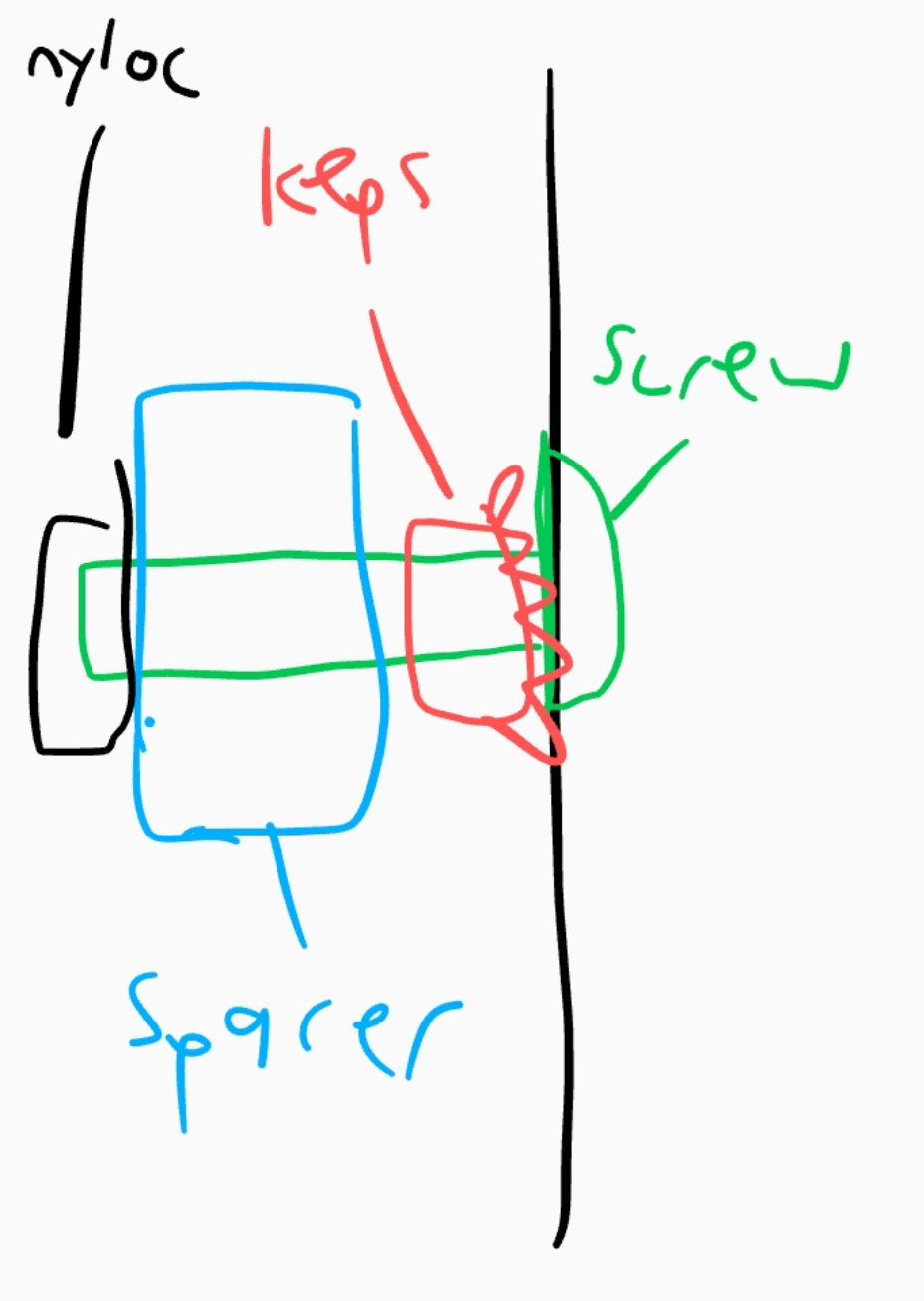
That being said, a proper tensioner shouldn’t add much friction. Were your spacers screwed in tightly, or could they rotate? You usually want the spacers to be free-spinning in order to minimize friction. We generally do something like so:
in order to keep the screw tight while still allowing the spacer to spin freely.
EDIT: by the way, is this showing up as a reply to you guys? It seems like it’s 50/50 whether comments actually show up correctly when I reply to someone
It did cone up as a reply. It only shows up as such to you if it’s not the following immediate message.
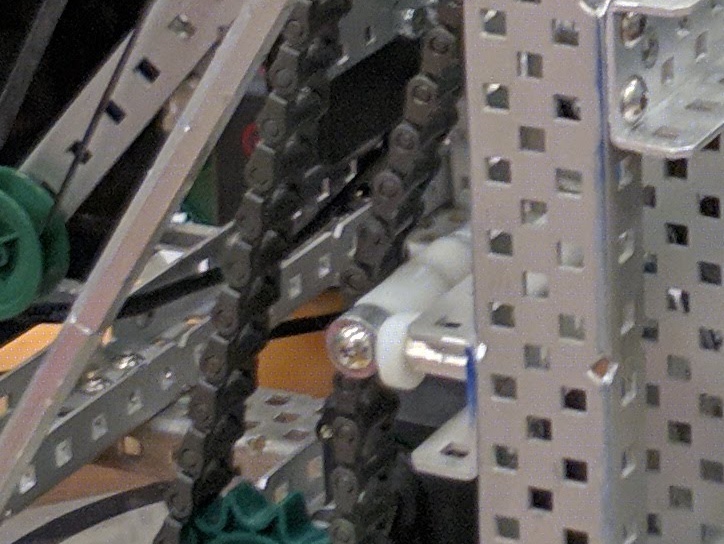
Yes, I had the spacers freely rotating on the fixed screw, as pictured. The chain wasn’t too tight when the tensioner was added. It just wasn’t absolutely necessary, so I took it off. (My intake was essentially a really small flywheel. Hence why I wanted to see if adding a tensioner would help or hurt the speed. I can track down an old vid if anyone’s interested, but I have posted a link somewhere.)
chain tensioners are actually rarely necessary if you build well - and if they are necessary, should not introduce that much more frition. Take a look at our drive: there’s an insane amount of “slack”, but we didn’t need a tensioner.
Most of the time, if your chain is tensioned to the point where there is no slack - it’s too tight and is adding unecessary friction just by nature of how chain works - even if the tensioner itself isn’t adding much friction. The slop that you get from it usually isn’t that big of a deal, and chain itself should rarely be used to transfer power directly, using it to split the power delivery works a lot nicer (meaning that you have still a direct driven gear at the start) on the drive, for other mechanisms, I don’t think that the slop will matter for chained applications.
I guess it depends what you’re chaining. On our second TP bot, our lift was chained to the motors because it allowed us to locate them in a convenient spot (don’t ask why we had 2 lift motors). In that case we very much needed proper tensioning in order to accurately control the lift’s position. Our original cortex bot had a drive/lift transmission, which meant we needed either a long geartrain or chain. Tensioning was less of an issue there, as we had encoders on our wheels, but it was still very helpful in order to prevent wind-up on the velocity controller.
Of course you should never make chain too tight- that’s why we tension in the first place. Our lift, for instance, would have worked with one less link, but it was extremely tight and added way too much friction. We added a chain link, but this introduced a ton of slop, so we tensioned it in order to be as tight was possible while not noticeably increasing friction.
I guess you would consider this incorrect building, and I agree that it’s usually better to find solutions without chain, but in many instances it simply makes things much more practical and, if you can eliminate the primary issues with it (slop). I would say it is perfectly acceptable to control things with chain. Our lift worked extremely well. We had no issues with slop due to the tensioning, and no issues with friction in spite of the tensioning.
In your example of linking mechanisms that are already driven directly (I know many teams who did this for their chassis), you’re right that slop definitely isn’t a big issue. I would have thought this is an unusual use case though; in fact, off the top of my head, I can’t think of anything but a chassis in which you would do this. (I’m sure there are other use cases, I just can’t think of any right now.)
I sometimes just use chain because it looks neat and is comvinient. I’ve had situations where I didn’t need chain, but it simply made locating a motor so much easier.
Granted, chain obviously has its issues. But I consider myself competent enough to know when a load could be too much for chain. And when I do or don’t need an idler for tensioning. (However I expect I’ll look back at those applications in the future and realize how dumb of a decision it was and how lucky I was it didn’t snap.)