I am in a discussion with my students after one built a flywheel launcher. We are all getting different answers.
Here is the setup:
Motor driving and 84 tooth gear which turns a 12 tooth. On the 12 tooth shaft is another 84 tooth that turns a 36 on the wheel shaft.
Can somebody with more experience with compounds help explain this?
Thanks
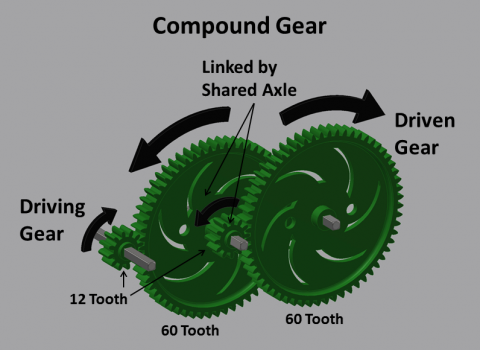
Here is a great resource to find that answer:
http://curriculum.vexrobotics.com/curriculum/mechanical-power-transmission/compound-gear-reduction
In this image the gear reduction 5:1 and then 5:1 again. That’d be 25:1 overall. You multiply them out when compounding the gears.
In your example 7:1 and then 2.33:1 so multiply them out to get a 16.33:1 effective ratio.
Thanks Team80!
Thanks again. I keep seeing these insane gear ratios on youtube and here. With our test it brings up another question. When we spool up the 2 5 inch wheels with a motor each at a 1:16.33 ratio and it shoots pretty wicked as it is, but one motor keeps either drawing too much current or overheats.
I know it is a high stress ratio, but one motor does much better than the other. Are there any suggestions or comments on this type of situation?
Motors can vary slightly in quality as well as the internal grease wearing off.
Are the motors the same age and seen similar wear prior to this? One may be further along in its useful life.
Any attributable friction on the one that overheats? Bearing block holes a bit different? Does the ball generally get pushed by that side more than the other? Any grease anywhere (in or out of the motors) to help things?
Does the problem child side spin at the same rpm? Does the one motor rattle when you shake it?
EX: 1:2 and EX: 2:1 are not interchangeable.
1:2 should be the torque ratio while 2:1 should be the speed ratio.
input : output
the gearing you posted represents a very strong slow lift type of gearing.
just makes thing less confusing.
please correct me if I am wrong
I won’t say you’re wrong, but it’s not like there’s some kind of international standard for this sort of thing. Check out the following to see what I mean:
The motors are about the same age, but I have not checked the grease or anything. I will start experimenting with grease and different motors.
On the ratio… Here is my reasoning… input to output or drive to driven…
The main gear turns 1 time and the drive gear turns 16.33 times which is a speed setup. I am not sure what the standard is but that is the way I think about it. On the other side of the coin… drive to driven…
16.33 turns on the drive to 1 turn on the driven or output is a torque setup.
I may be wrong, but that is the way I have seen it.
Bill R.
With this gear ratio and one motor per wheel, the difference between motor overheat or not is very small. I had a similar setup and found that just a small amount of friction would make a big difference.
My latest setup will have three motors with a 40:1 ratio (that’s 1.6x in the motors and 25:1 external), I’ll see how that performs next week sometime.
I believe that it is probably the frction
Here are 2 short videos of the shooter in action
https://www.youtube.com/watch?v=VkT6FPwyMFw
Ummm… safety glasses? :mad:
is it 2 or 4 motors? it sounds like 4.
It is a 2 motor for now. The builder will most likely make it a four… Yep… safety glasses next time!