Great topic. I’ll add a link here to my old drive from 2014, it’s been updated now for V5 motors, all that was needed was slight adjustment to allow them to fit.
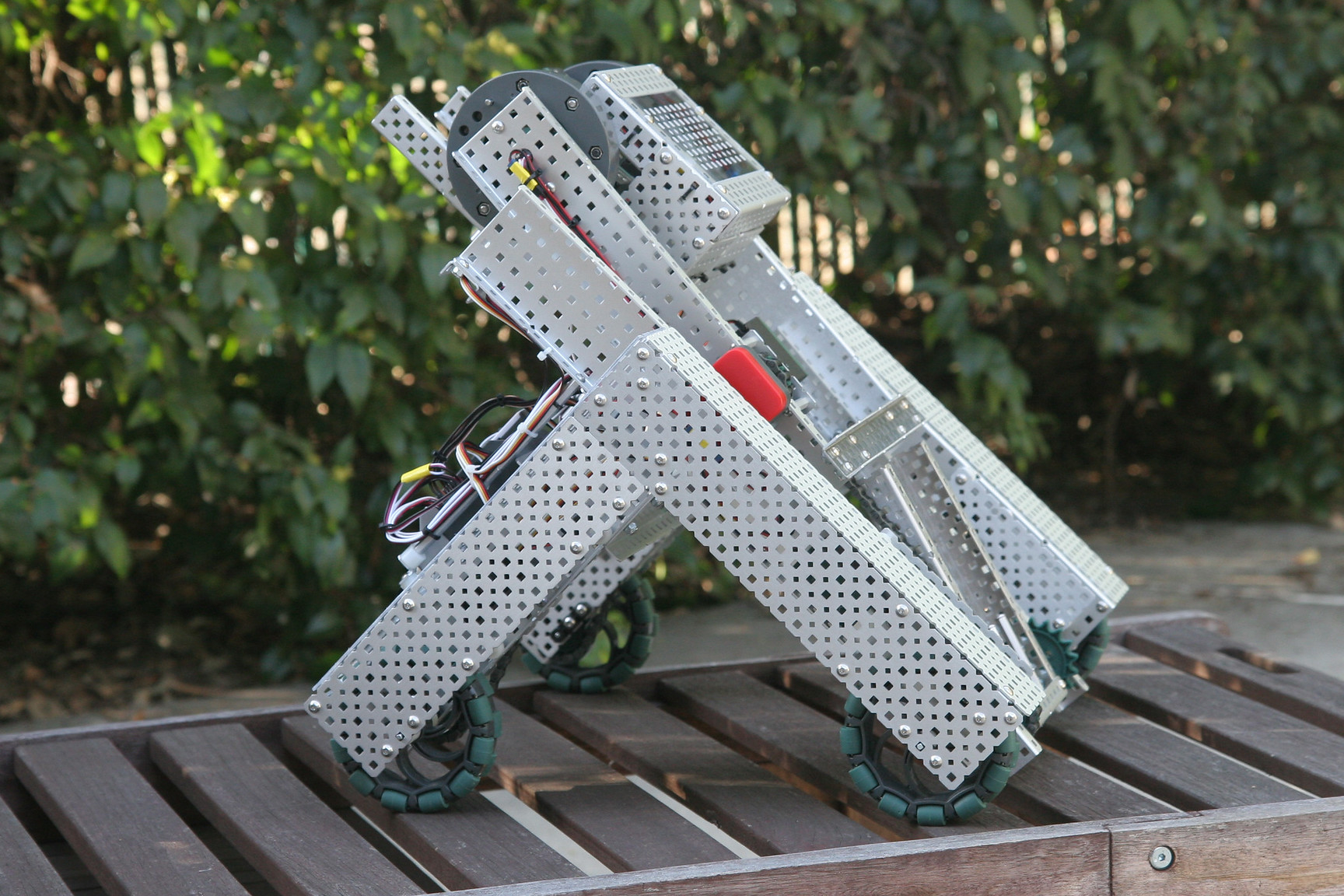
and then there’s my favorite derivation of that, the triangle chassis.