Designing a Quality Drive
A drive is the foundation of any robot, and as such it is crucial to have a quality drive if you want to have a quality robot. Yet, many newer teams struggle significantly with making a solid drive, and I’ve realized that each time someone asks for help or feedback on their drive, we have to re-explain how to properly construct a drive each time. This makes me think that the vex forum would greatly benefit from a topic that details how to make a proper drive.
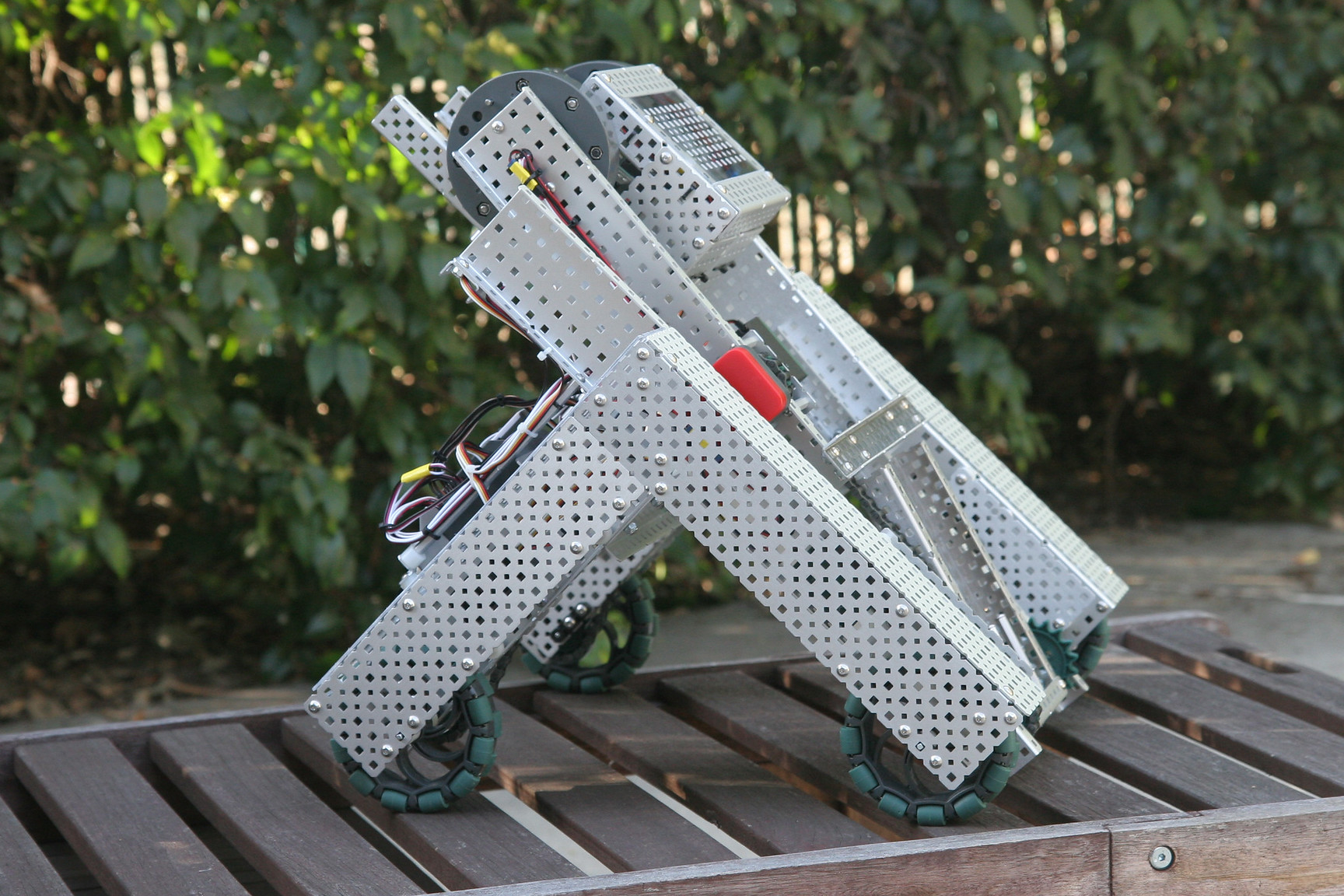
Using CAD, I have designed a solid drive that I will likely use myself in my early season robot. I’ll be using this particular design as an example, it is by no means the perfect drive. There are many options when it comes to the design of your drive, and you can be successful with many different design choices.
In this topic I’ll be breaking down my design process for making a drive, as well as explaining all the building techniques I used that result in a quality build.
Here is a timelapse of me CADding this drive, it took me about an hour to make the entire thing, and this includes many mistakes I made and had to correct.

Design process
First, I had to think about what I needed my drive to accomplish. I wanted it to be able to traverse the field quickly, and I wanted it to remain simple so I didn’t have to spend too much time on it.
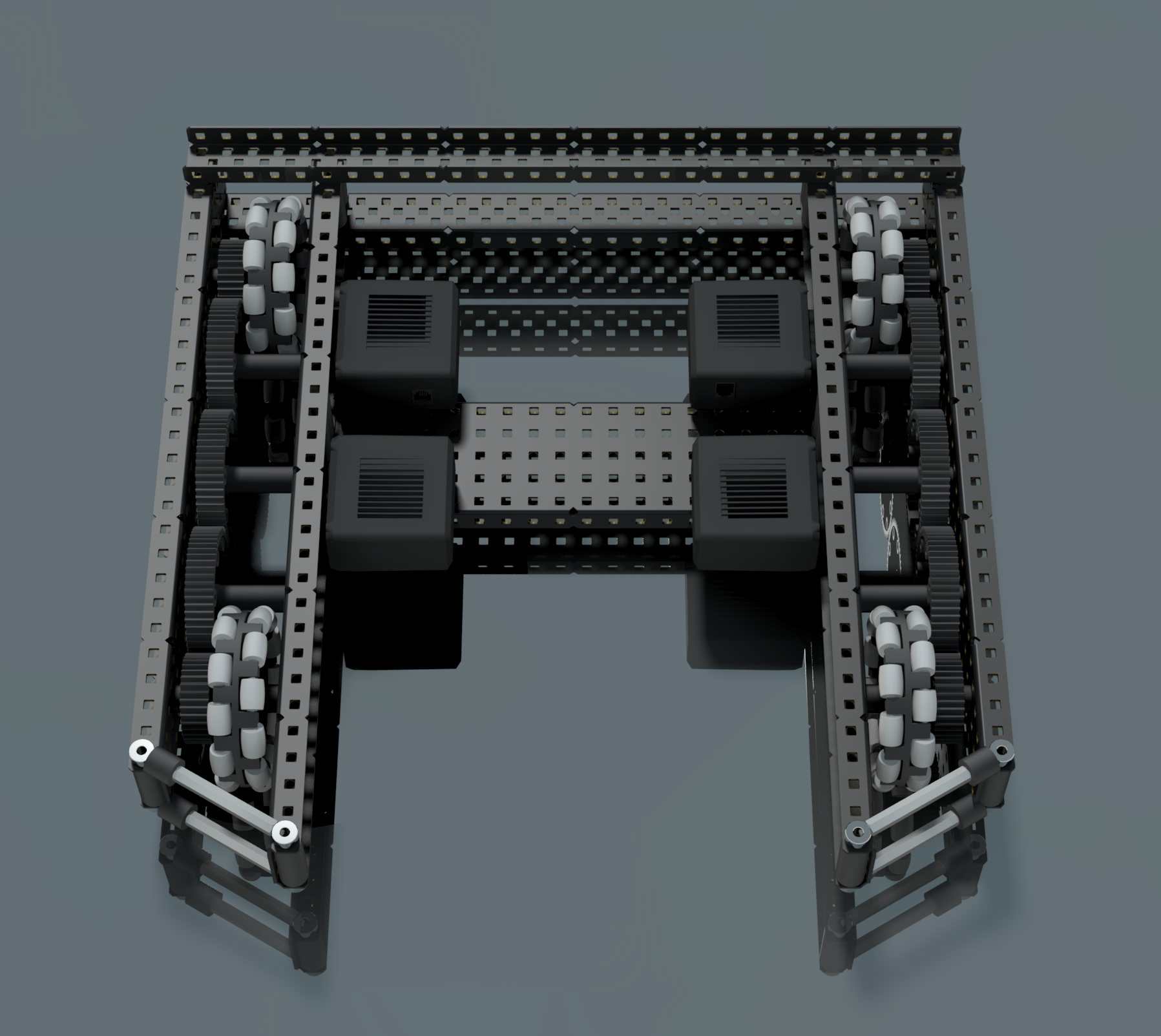
Next I thought about some constraints I wanted to impose on myself. I do this in order to force myself to make the drive simple, solid and competitive. One of these self constraints was that all the holes had to line up perfectly. I always find this to be good practice, when you start having to use only standoffs or drilling holes to make things fit, things start getting janky very quickly. I also wanted the drive to be 30 holes by 30 holes, to give me plenty of room for scoring mechanisms, but not be too big that it wasn’t maneuverable.
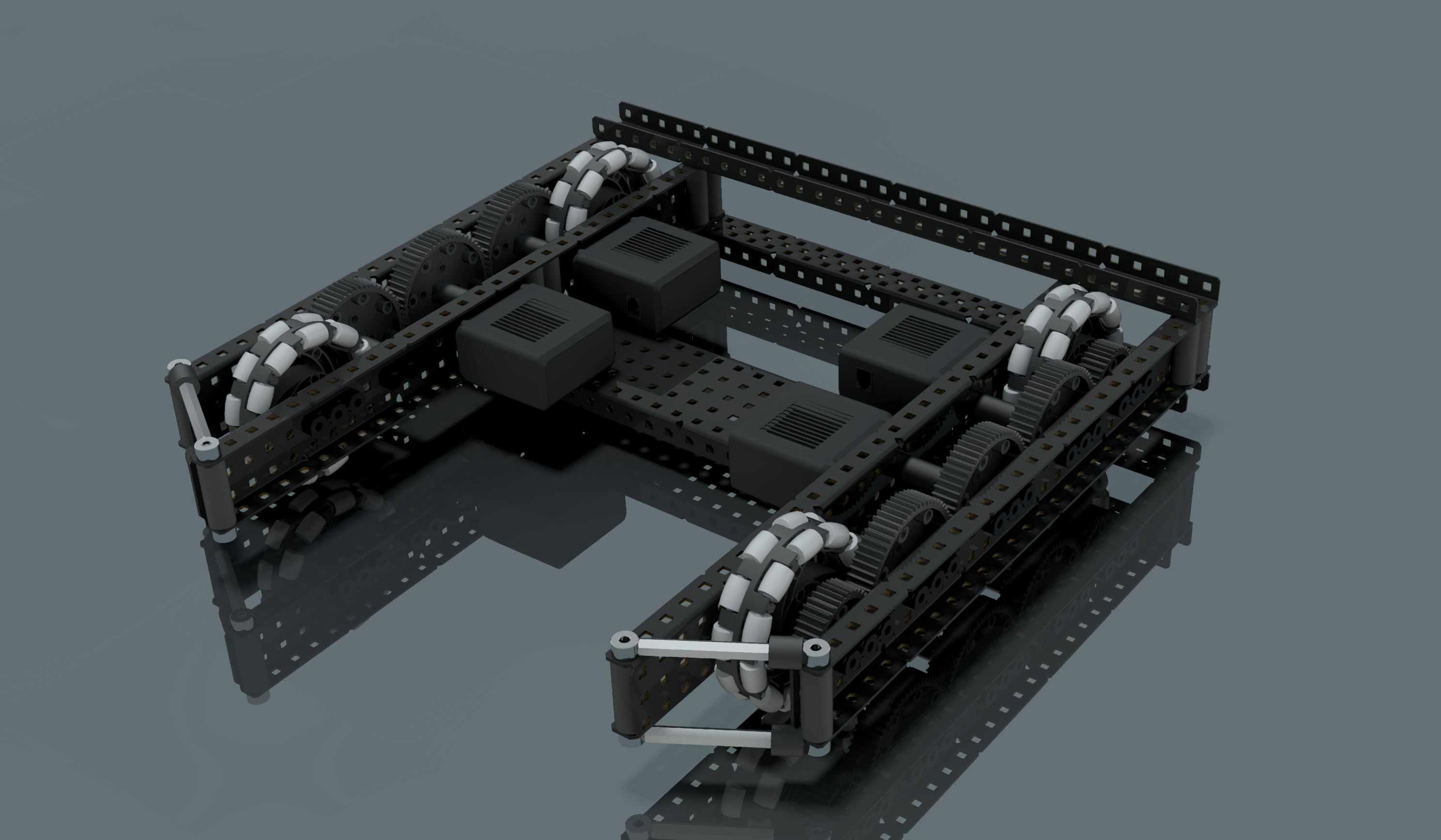
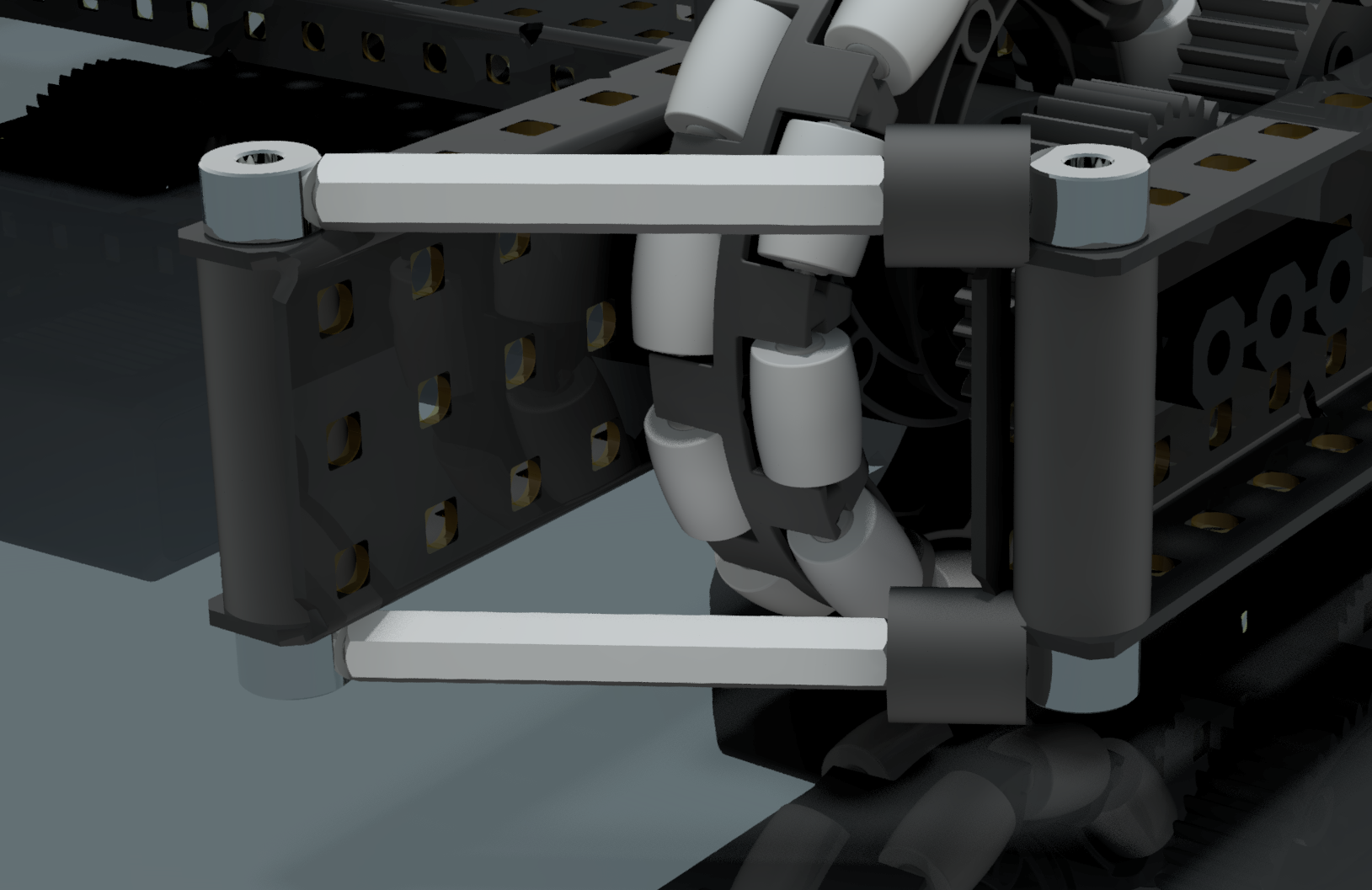
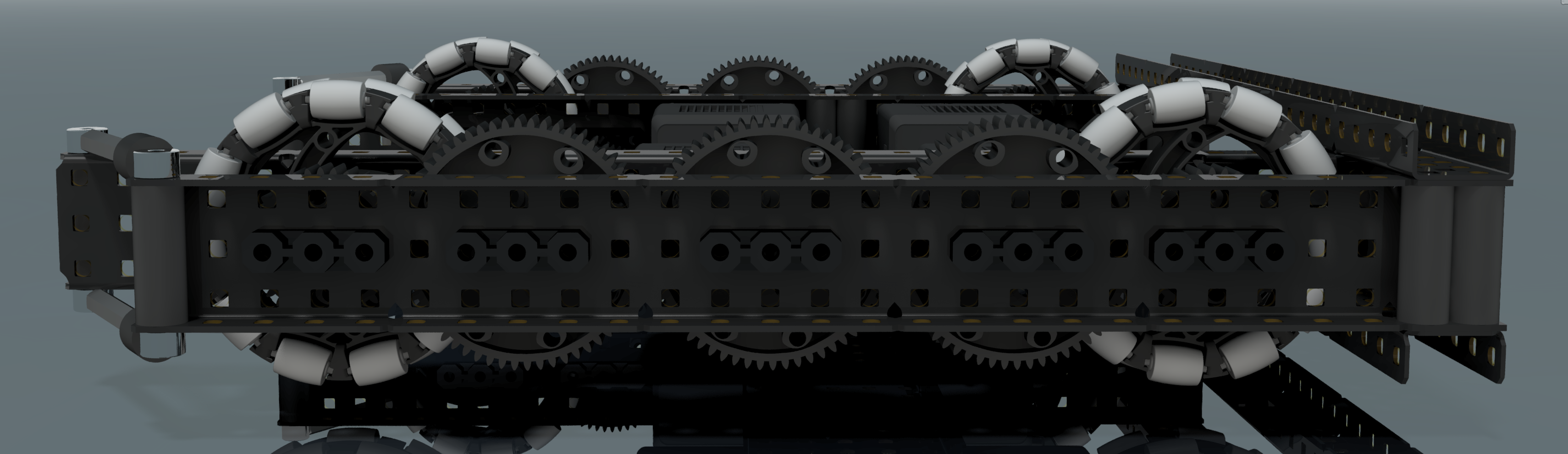
Then I thought about what specific features I wanted this drive to have, that would allow me to play the game better. I wanted the ends to be tapered, so that I could have more precision when grabbing balls. Also tapered chassis just look really cool, and the taper braces in the front are just cleaner than a c channel going across the front in my opinion. I also wanted my drive motors to be nearer to the back of the robot so that I would have room to make a shallow ramp in the front to bring the balls into the hood. I also decided that I wanted the speed of the drive to be 200 rpm 5:3 on 3.25" wheels. I like 3.25" wheels because it lets me have a lower riding chassis, and they’re more compact and easy to work with.
I then thought what features the drive would have that are a given. One would be the fact that the sides of the drive would be 6 holes wide. I almost always have my drive sides 6 holes apart, its a very nice number to work with because the wheels and gears always fit well, and any cross braces going across the center can be exactly 20 holes long. Another given was a rear cross brace that spanned the entire width of the robot, I always have a brace like this, with 2 c channels sandwiching my drive, I find it to be very strong and convenient for mounting. Another given to me was at least one brace going across the center of the drive to prevent the sides of the drive from twisting. I would say that a brace like this is absolutely necessary to prevent a drive that can flex and flop.
With these things in mind (if it helps you could write it out in your notebook as you do it) I could start the construction of the robot in CAD. I’m going to interrupt my breakdown really quick just to restate how amazing and powerful CAD is. I never build anything without CADding it first anymore, and it’s made a world of difference in my robots. I would heavily encourage any team, no matter how advanced, to use CAD whenever possible, it is the single most powerful tool that everyone should have access to. Ok back to the breakdown, I usually start my drive by pulling out the pieces I want for the general frame.
For this drive that was 2 27 long c channels for the outer rails, 2 30 long c channels for the inner rails, and 2 30 long c channels for the back bumpers. I used 3 wide c channels on the rails because I don’t have enough 2 wides for my entire robot to be made of them right now, and because I just like 3 wides a lot. I’m also not concerned about the weight of my robot this season, because almost all the structure will be very close to the ground, and there just isn’t going to be very much of it. I used 2 wides for the back bumper because they take up less space, which is good. I then made the taper on the front of the drive with standoffs, spacers, and shaft collars. I did this because it looks cleaner than using c channels going across the front, and it gives a slight benefit to the maneuverability.
I then started to add the wheels and gears to the drive, sort of figuring out the gear scheme as I went. I made a few mistakes here, where I accidentally made a gear train that would make the front and back wheels spin in opposite directions. I went back and fixed it later in the CAD, which you can probably see in the timelapse.
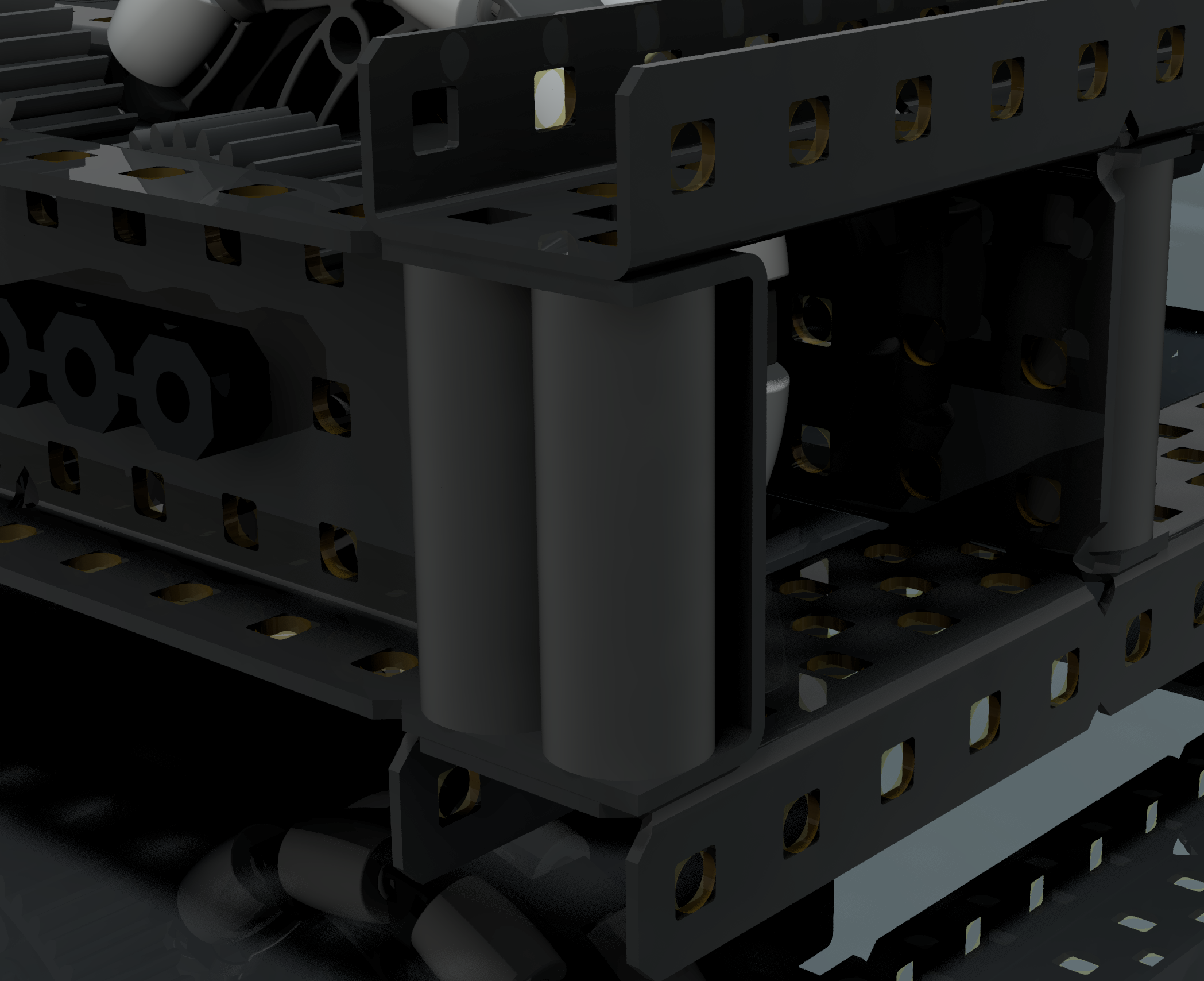
Then I added the brace going across the center of the chassis. I used a 5 wide c channel for this brace to increase the distance that the mounting screws could be on the brace, which eliminates most slop present from the square holes bigger than the screws. Also because I want to conserve 2 wide c channel and I really am not concerned with weight on my drive. In fact, I think the extra weight is better this season because it will make you less tippy, and will give you more inertia to use against opponents in defense, and will give my robot better traction with the ground. I’m not going out of my way to add weight, but I’m not concerned with reducing it either.
I also went around and added box bolts everywhere I could. This is a very powerful building technique that most teams don’t use. It doesn’t look very important, but looks can be deceiving. I find box bolts to add so much stability and strength in connections, and will really help to eliminate any kind of twisting or flexing in your drive.
Add some bearings to all the places that need it, and I’m done. I don’t bother with shafts and screws, just wastes time and uses more computing resources. I also use screws and nuts when their presence has a chance of interfering with something.
I hope you found this topic informative and helpful, and I encourage you to give your own tips and advice below, so that this topic becomes a useful place for people to learn how to improve their drive quality.