Alright, we got one side basically done, the rubber bands can hold it in place and lift it with basically no pressure at all. The only issue… It’s like 2 feet to short! Right now it’s like 4 pegs high and that’s way too short. How do you get the height more? I provided some pics, criticism only helps on this.

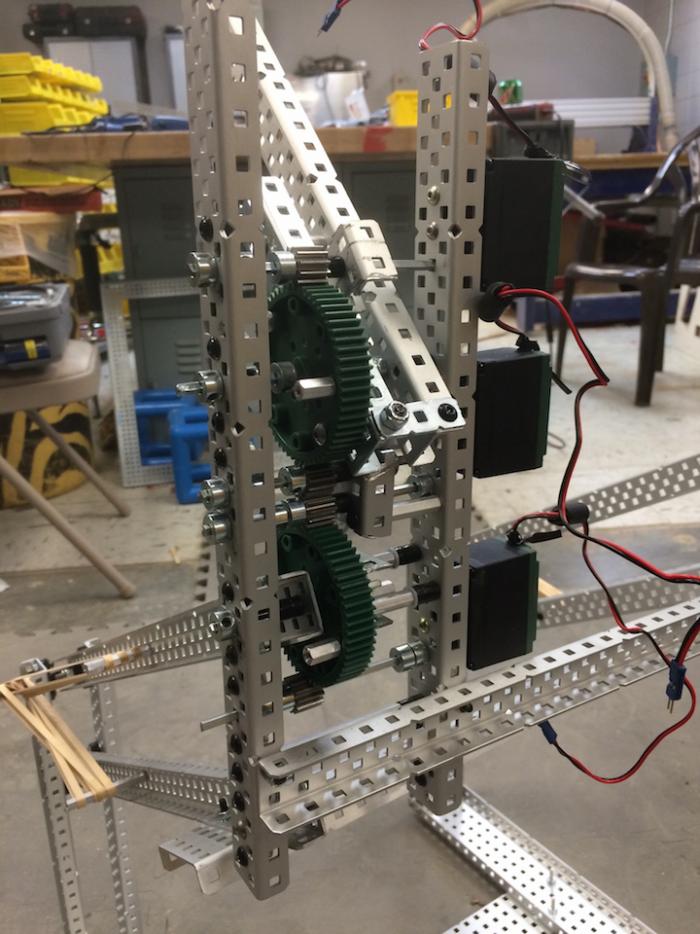

The small pieces of C-channel that you are using to bridge/bearing closer to your pinion gears is limiting your arm travel. You need to remove those.
How many cubes are you planning on lifting? I would do 1:7 and do 4 motor lift. The 84t gears will get you a little bit more height also.
You need to space the arms out farther vertically on the middle vertical bar. We were able to sufficiently power ours with 4 motors and 6 orange rubber bands on each side. For our middle vertical bar, we used gears in this order vertically:
84T (top upper bar)
12T (top motor)
84T (top lower bar)
84T (bottom upper bar)
12T (top motor)
84T (bottom upper bar)
We only have the small 84 tooth not high strength, I made one by putting two together but they never seemed to line up and took a long time to make and it wasted a lot of time.
I want to lift two cubes. With pneumatic 2 cube intake with peg intake on the opposite side.
And state comp is on March 7 so, I was trying to make something more efficient and precise than the scissor lift we have so I don’t have much time to waste and get it programmed.
From what I’ve seen in competition, double reverse four bars look like they’re inaccurate and sometimes wobbly. I think any inaccuracy is because they can lift so quickly, and instability is probably due to build issues
Slow you can get precise and stable, but fast you get speed and wobble. Our scissor lift is extremely stable and precise, but is somewhat slow and we max out at 32 points last time we tested in 1 min 45 seconds. For me that’s too slow because I know we can do better, but the way the scissor lift is built, we can’t risk taking it apart and then end up messing up the whole robot before state.
I don’t think I have even seen a DR4B in Oklahoma yet, so I haven’t got to actually first hand watch one up close, but the good teams online all seem to have fairly stable RD4B’s. I mean, were like 1 out of 4 teams to do a scissor lift in Oklahoma that I’ve seen and one of those was college. Everyone has been doing claw bots, or 8 bars.
At CA State, I think I had the only 8 bar (and was the only one who couldn’t afford pneumatics), just about everyone else there had a scissor lift, double reverse 4 bar, or linear lift. Every scissor lift I saw leaned like crazy, I think one got bumped and fell onto the short post. The double reverse 4 bars were all pretty quick, but messed up in autonomous because of speed. My 8 bar has a 4 motor 1:15 gear ratio lift, which is slow but precise, but the drive can be twitchy.
One can be very successful with a reverse double 4 bar. Both team 118 and 2v are in the over 100 club. My daughter’s team(3388)(RD4B) and their sister team(3388t)(scissor lift) scored 85 in the quarter finals two weeks ago in our provincials.
However the build has to be strong with very little slop.
The use of the high strength 84 gear is almost a must. As a matter of fact my daughter’s robot has now doubled up two 84 high strength gear to decrease slop.
Cross bracing is key and can be tricky because of how everything folded together.
The distance between the two middle arm is only 3.5 inches. You can get more height with a reverse 4 bar 6 bar hybrid. We did not do that because of added complexity. We only use 4 motor for the lifts. Elastics do the heavy lifting. Her robot can do seven skyrise, 5 cube with ease. It is a bit complicated to do six cube( you have to put the sixth cube on to the 5th skyrise and than you add the six and seven skyrise, can’t put the sixth cube on to the 6th skyrise directly).
It seems like wobble comes frome the pivot points in the lift, which I alleviate with washers, bearings and locking nuts. That robot sounds awesome, I was thinking about trying a scissor lift after an attempt last year so horrible that nobody in the club has bothered trying since. I did see one or two 4/6 bar hybrids, they seemed really stable compared to others because of the additional points of contact.
I programmed half the lift today, and there is actually no wobble except for a small amount. With a 5:1 it lifts quick, and can stay in position with no wobble.
In the state of Nebraska there were a couple of reverse double four bar and the ones I saw were great, including team 1970K from mount Michael and currently they are in the top 25 for driver skills. Other robots I’ve seen on YouTube tend to wobble because the arm isn’t stiff enough or the motors aren’t running the same speed. My advise it to add a aluminum C-Cshnnel to the arm, and make sure all the motors are running the same speed. In my option the reverse double four bars are new and fast lifts that can get the job done efficiently, they provide a light and fast way to lift objects. They dont extend out far like a 8 bar and aren’t slow like a scissor lift.
What do you mean as the motors aren’t running the same speed?
Our entire robot is made out of aluminum.
Here is a link to the video I took today, the wobble you see on there is because it’s hanging off the side of a table.

you can make it lift higher by baring the top gear to a 4 bar that is above that.
you may also consider gearing your arm like the one in the pic 1:15 with high speed giving it about a 1:9.3. (this is my teams robot). we can easily score on a 5high skyrise with 3 cubes and can build the 6th.
hope this helps.
the pic is at this link on post 14, last attachment.
https://vexforum.com/t/my-reverse-double-4-bar-is-tilting/28526/1&page=2
To make it even higher, you’re going to want the 4-bar members touch each other. It looks like the smakk pieces of C-Channel are limiting that. You should be able to get more height out of that than you are.
I’m going to trim those small pieces that are causing it to get stuck tomorrow, our dremel broke today so we gotta fix that first.