Hello, my team and I redesigned our robot and are having some problems with the drivetrain, our drivetrain turns quickly, but forward and backward aren’t strong enough and go too slowly. Our drivetrain has 4 motors directly connected to 4 wheels. It would be a great help if you could give some advice on how to fix the drivetrain.
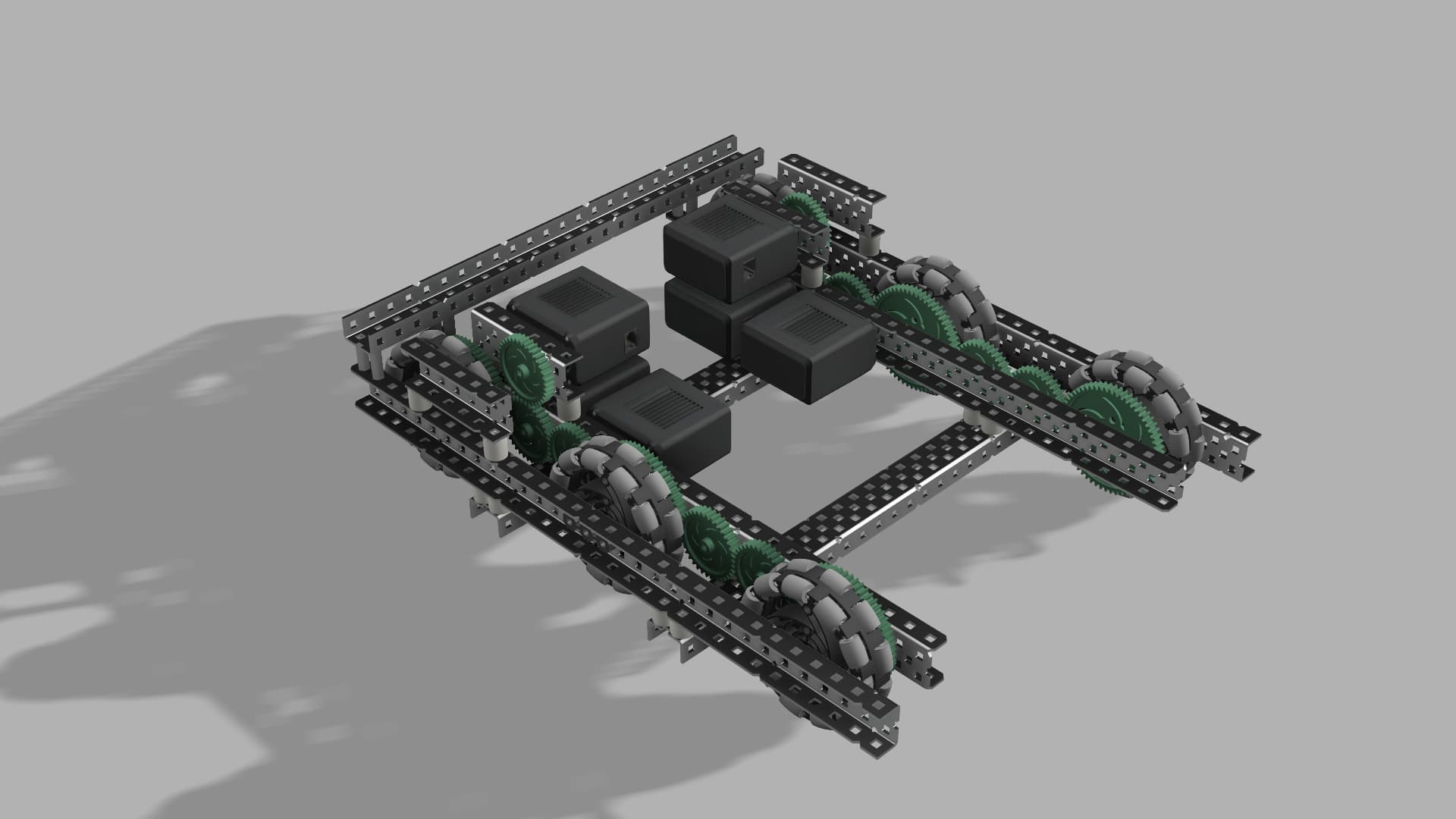
The issue from what I can see is the omni wheels have low traction on smooth wood flooring. At vex competitions, the tiles are made of foam, which is what you will want to test your drivetrain on for better results. You should integrate a gear train instead of connecting the wheels directly to the motors, this creates even force on all of the wheels. Once the gear train is in place, you can add a middle wheel so that there are 3 wheels per side, which increases traction The reason the bot turns easily is because of the omni wheels having almost no friction, can easily spin around the center of mass. There are other issues with this drivetrain, but assuming that your team is new to VEX, this is not a bad start. Just for reference, I attached an image of what our old drivetrain looks like:
Don’t build this exactly, the gearing is wrong and the wheels will be spinning opposite directions. Extra idlers need to be added between the wheels so there are an odd number of gears in between the wheels.