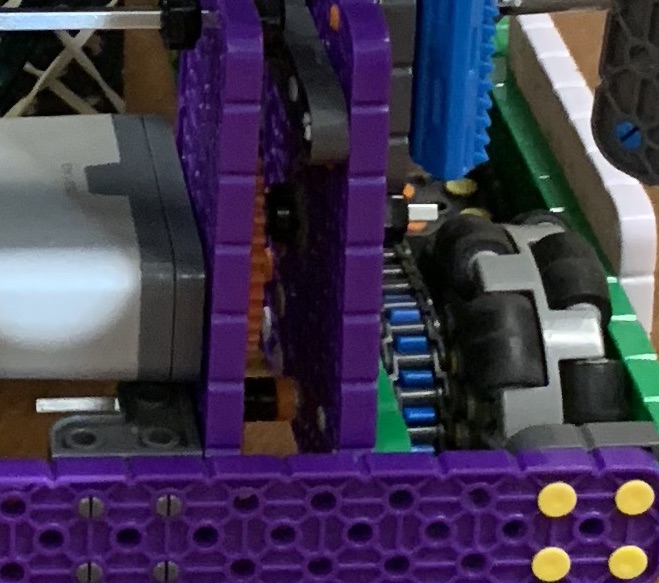
Our robot’s drivetrain used to run on 1:1 ration and we found it too slow. We tried a 3:1 ratio with gears but this time it became so fast that we couldn’t handle the robot well on the field. We rebuilt it with a 2:1 ratio with a chain but it didn’t work for us either. The problem with the chain is that everything looks fine except it doesn’t run on the field. When we lift the robot it runs well but when we place it on the field it seems that the chain is not strong enough to turn the wheels and make the robot move. I’m attaching a photo of our drive train here.
Do you have a solution for a 3:1 ratio? I mean how can we modify it so robot becomes easier to handle?
Do you have a solution to our chain issue that I mentioned above.?
Your chains are slipping. They way you have set up the chaining with the 16t sprockets in the middle requires strong tension, especially on the inside sprocket.
The way you have it set up, I would recommend you gear the motor to one of the wheels (a 2:1 probably on the inside) and then chain the wheels together. Let me see if I can find some pictures of our robot (or at least old versions)
When you mention the “chain is not strong enough”, do you mean that the chain is skipping? E.g. the motor is spinning, but the chain is not?
If this is happening, it’s likely because the chain isn’t wrapped around the sprockets enough. Any of the sprockets that you wish to either be an input shaft (from a motor) or an output shaft (to a wheel) should have the chain wrapped around at least 1/3 of the teeth on the sprocket.
In this photo, the sprockets on the wheel shafts have about 1/2 wrap, so they are good. But the input sprocket on the motor only has maybe 3 or 4 teeth engaged (out of 16), which can lead to chain skipping teeth.
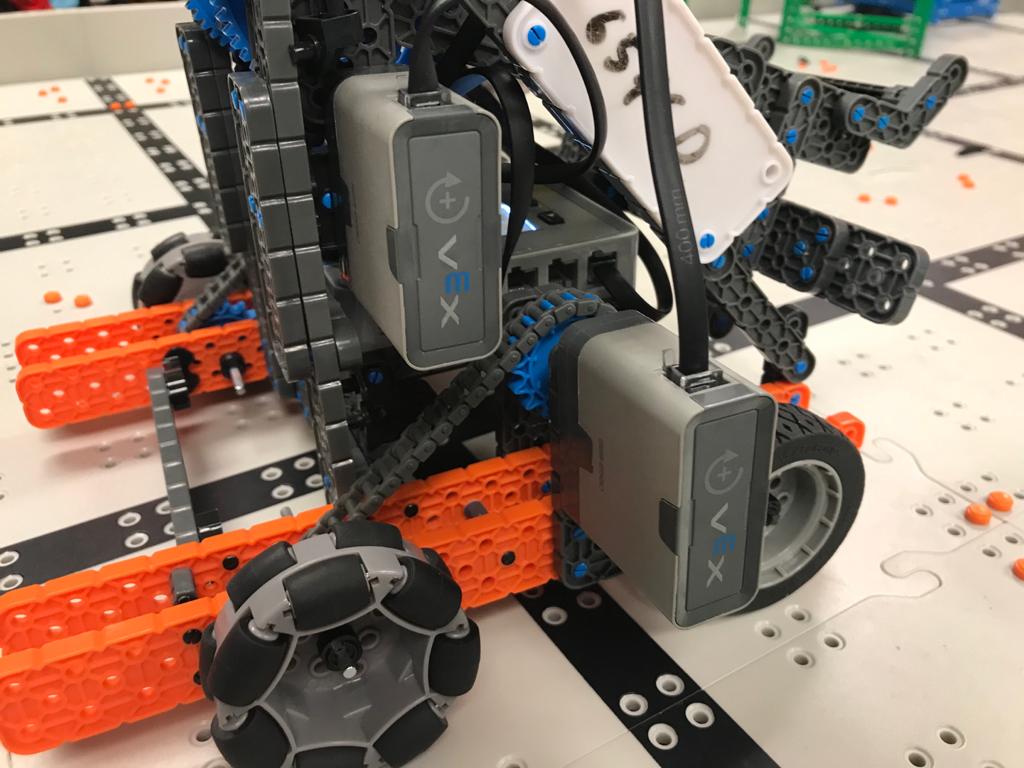
Here are a couple of pictures. We had an intake mechanism that was chained exactly like your drivetrain, and we noticed it slipping as well. The 16t sprocket was not wide enough to drive traction.
On the 2nd picture is a shot of our motor and drivetrain. You’ll see that we have a box with orange gears on it connected to the motor. The gears there were a 2:1, and from the driven gear in that box is the connection to the sprockets and chain which connects both wheels.
From the angle of the picture you can’t see it. But you’ll see the shaft that is just right under the motor and extends all the way to the wheel. The driven gear is in the box right there underneath the orange driving gear on that shaft.
UPDATE: We did it as you suggested and it worked. Thank you all very much. We didn’t decide what to do with the other robot with a 3:1 ratio (with gears) yet.
Awesome! I have to say the way you have chained your robot is very much the we have our robot as well. The pictures I posted was from our robot back in the summer. Good luck!