This procedure calibrates the accelerometers in the Inertial sensor and saves the result in non volatile memory.
This procedure needs vexos 1.0.10 or later.
Only perform this calibration if your VEX inertial sensor is showing angles for roll and/or pitch that are larger than perhaps 1 or 2 degrees when the inertial sensor is on a flat surface that is known to be level in both axis.
Some inertial sensors can show significant error for roll and pitch when placed on a level surface. To check an inertial sensor use the dashboard on the V5 brain, here is a screenshot of a sensor with significant error.
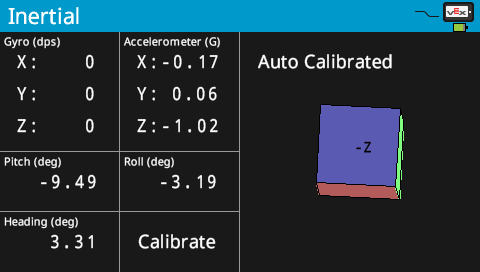
Both roll and pitch are outside of acceptable limits.
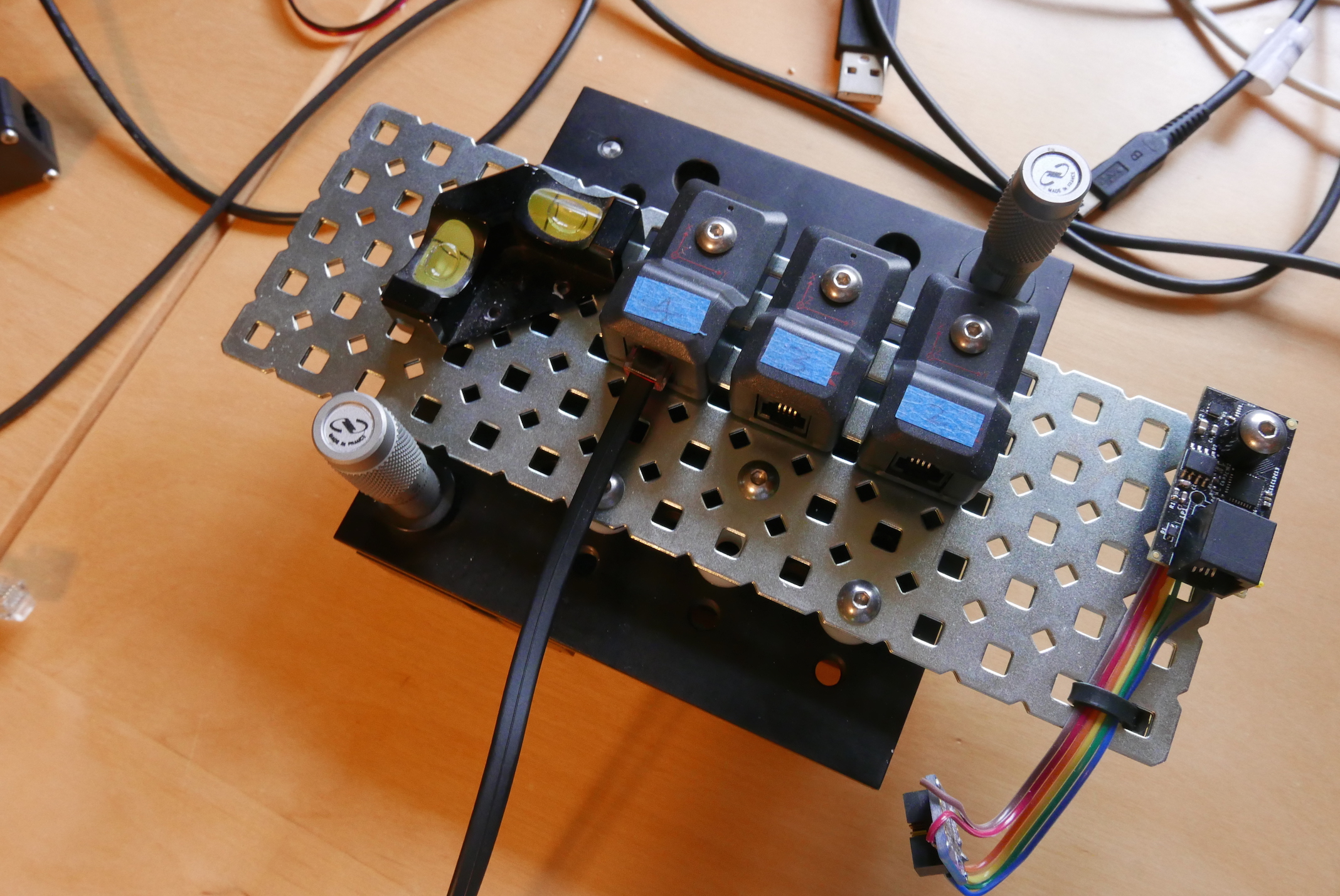
Attach the Inertial sensor to suitable VEX structure (C channel etc) and place on a level surface, use a spirit level to ensure the surface is in fact level as best you can. Here is the setup I use, this is somewhat overkill, but it allows me to have easy adjustment for leveling the surface.
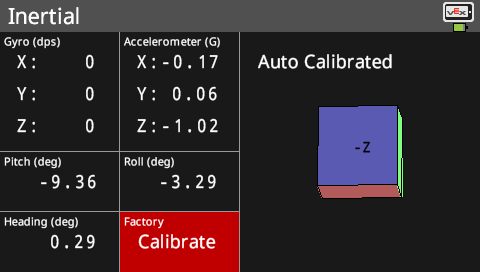
Connect the Inertial sensor to the V5, open the V5 dashboard, press and hold the calibrate button on the dashboard for about 10 seconds, it will turn red and show the word “Factory” next to the calibrate label, stop touching the V5 screen when the button turns red.
Now touch the red calibrate button again, the inertial sensor will calibrate for about 2 seconds and then return to the normal dashboard screen.
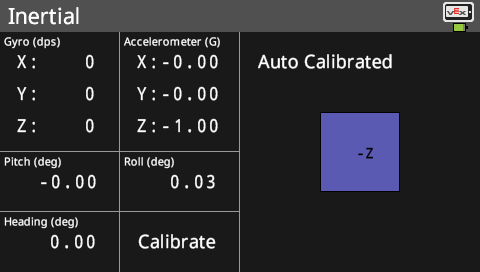
Values for the accelerometer, roll and pitch should now show normal values for an Inertial sensor on a level surface.
This calibration only needs to be performed if the sensor has an error in roll and/or pitch, it is not something to do on a regular basis, it does not need to be performed during normal use of the sensor. Once calibrated, it is very unlikely you would ever need to calibrate the sensor in this way again.
Constant use of this procedure may potentially damage the sensor, you have all been warned.