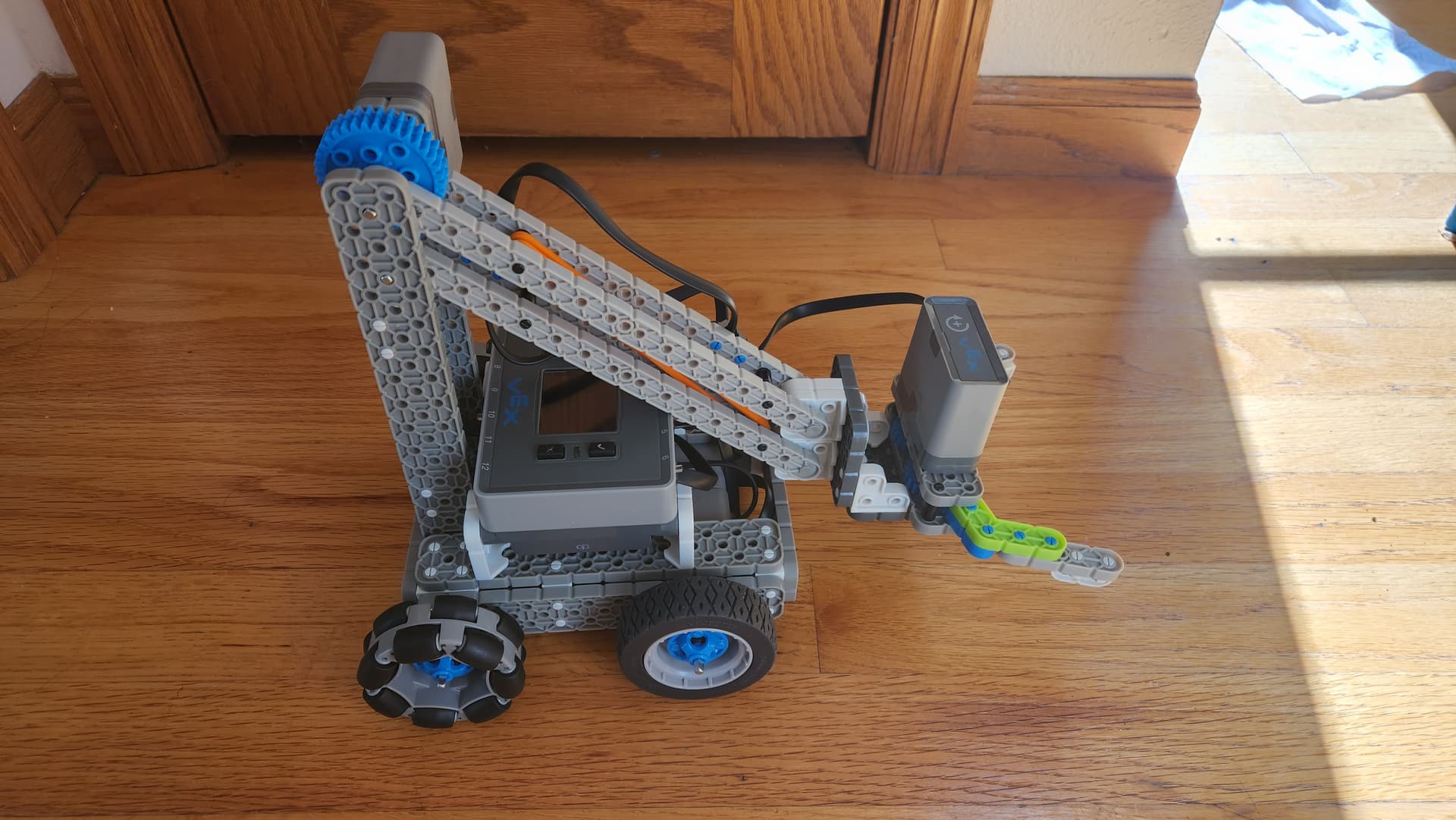
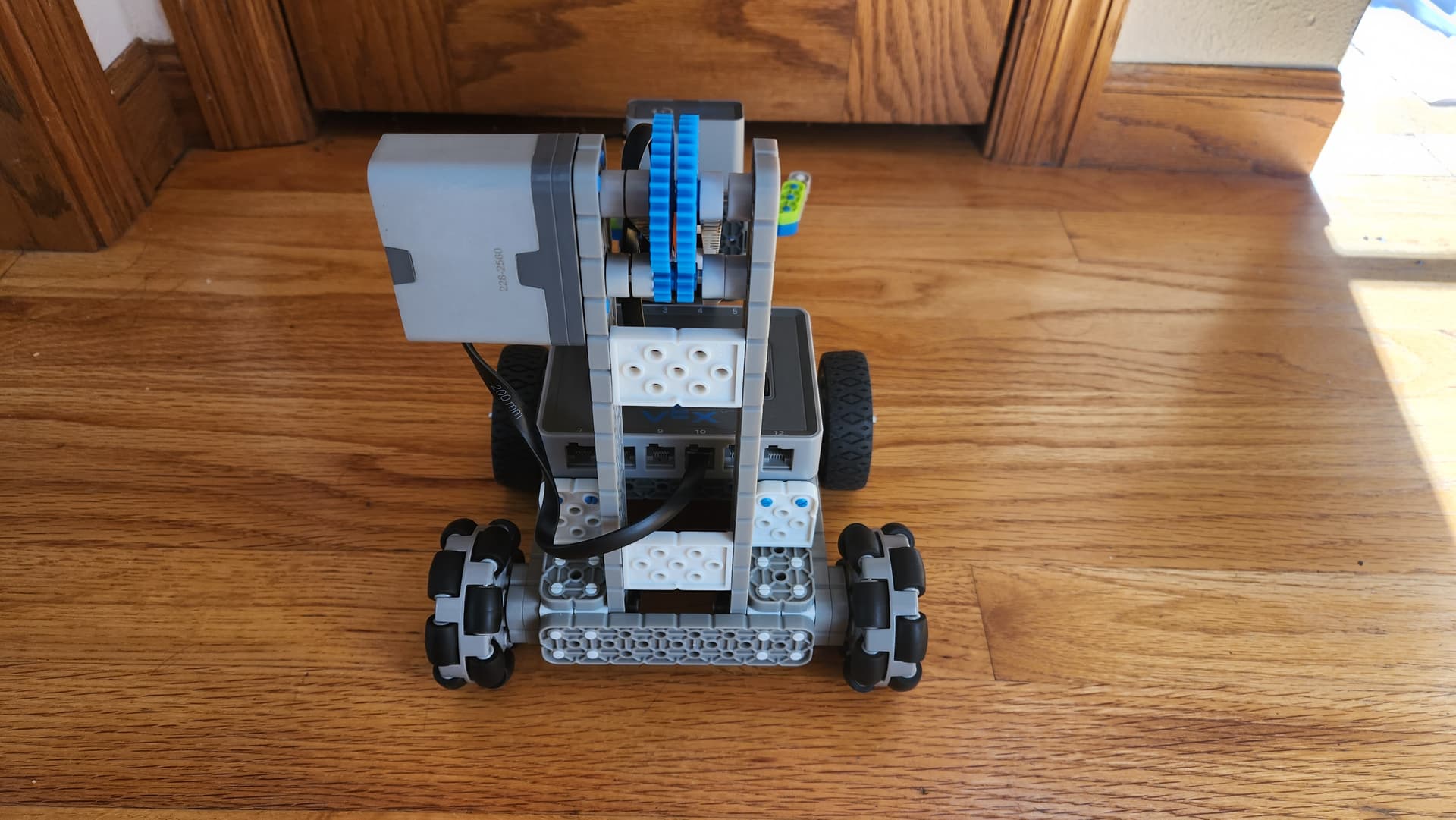
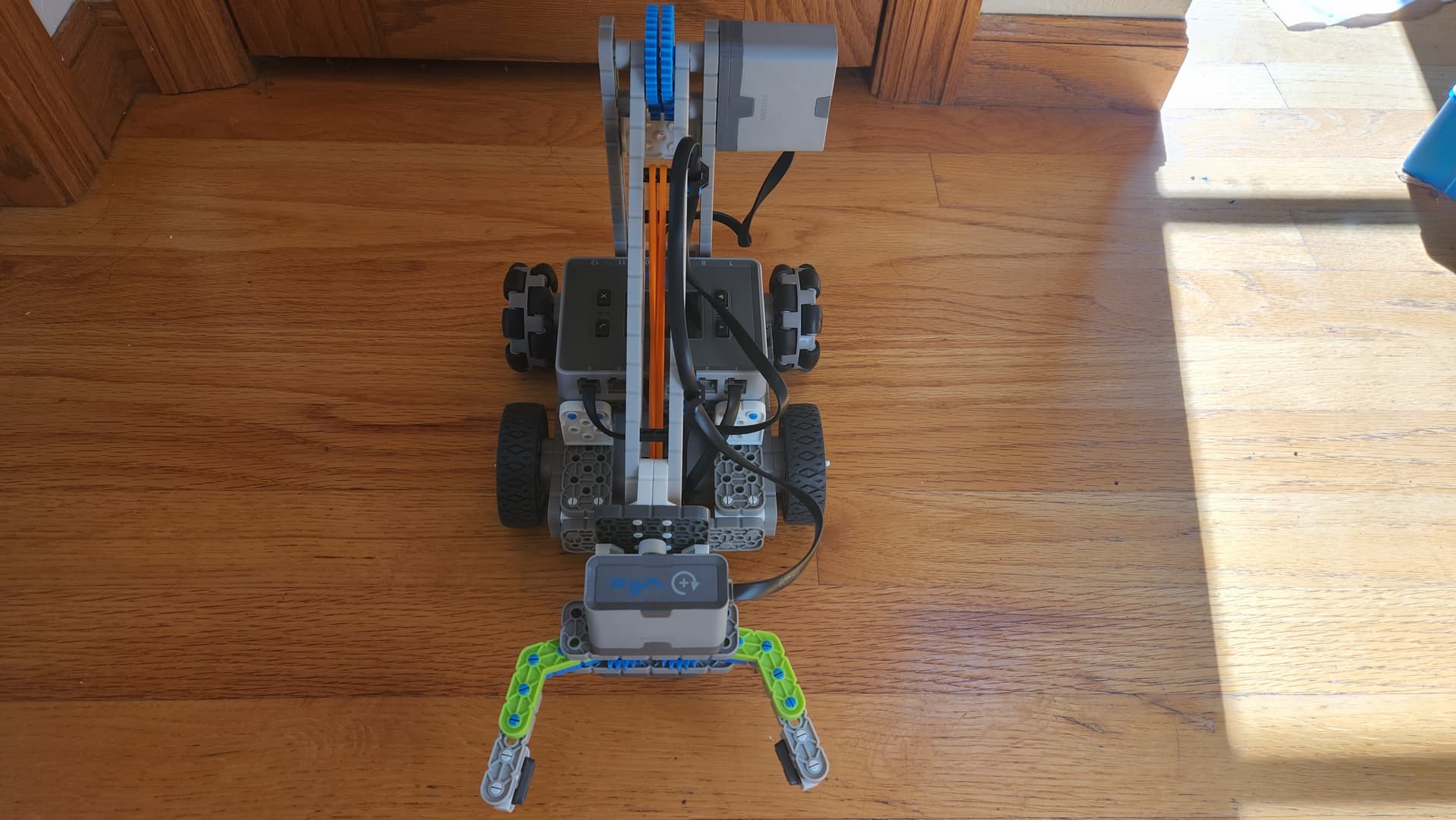
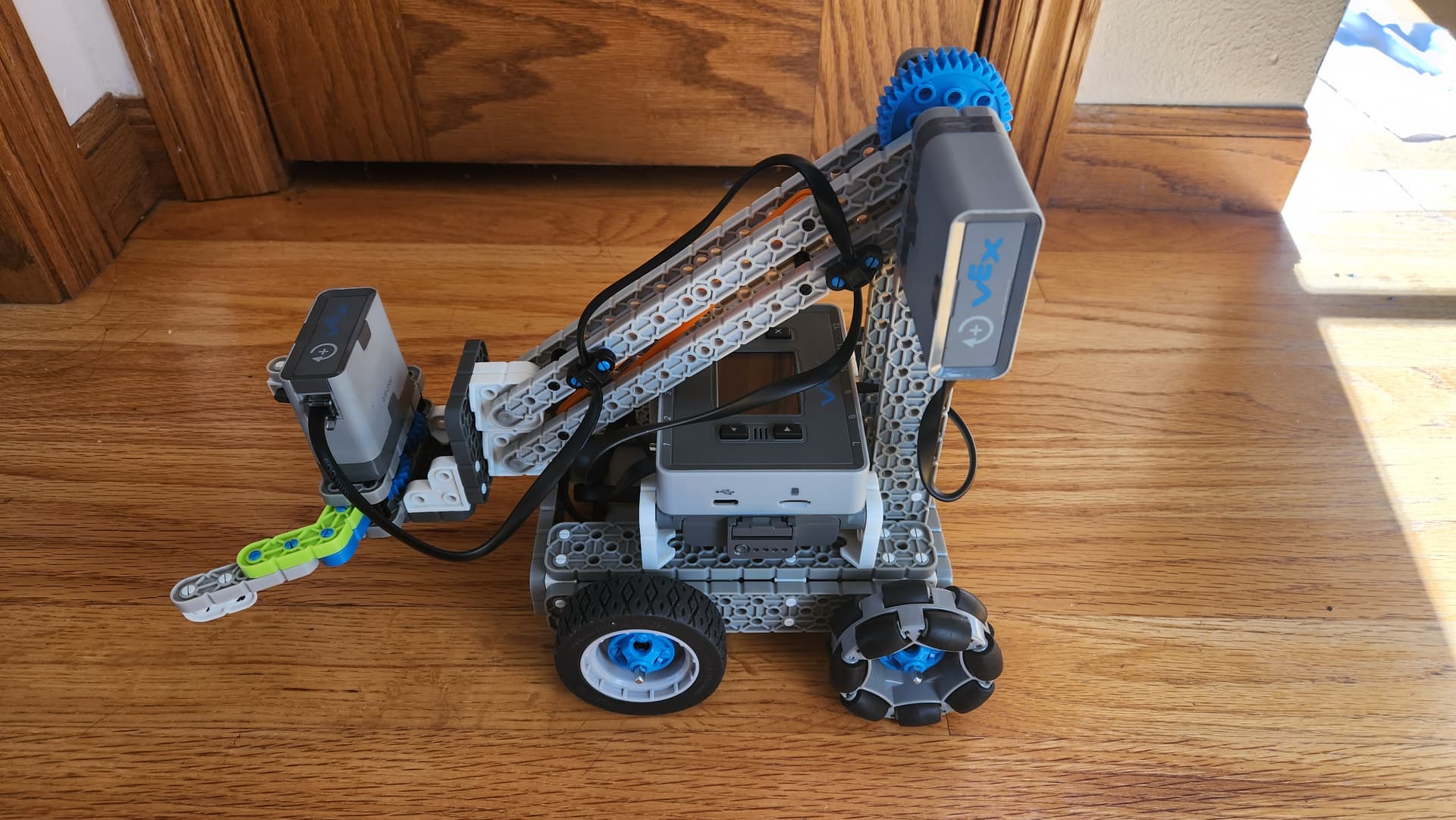
I’ve never had a VEX before so I decided to get the second generation VEX IQ education kit. So my son built the clawbot, which was very disappointing.
First of all, maybe this is a settings issue, the bot moves and stops very suddenly as you actuate the remote. So it’s very hard to fine tune the orientation or inch it. I’ve never controlled a VEX IQ before but if the joy stick control routines are not good enough, it would result in such jerky motions.
Next, the arm is very very shaky. If you attempt to turn the bot, the claw just shakes from side to side, maybe due to the flimsy plastic beams and the design of the bot (designers just didn’t know physics). Anyway, not a good way to go about clawing things.
Third, this may have something to do with the tennis ball we’re using because we don’t have any balls for competition. The claw is too high to grab even when it is lowered all the way down. Also the claw tends to open up every time they touch each other or the ball. It’s not getting loose, but rather it just opens up like a designed response to torque going over a limit. So even if we feed it a ball, we would have to hold the button down to keep the claw from opening up.
Lastly, the motor that runs the arm up and down heats up to an uncomfortable temperature and whines audibly (the gear ratio inside the motor may be too low to provide sufficient torque). If you keep the arm up for a whole, then the heat from that motor burns your fingers. I’m not sure if it is supposed to be like that. Charging the battery also creates a very hot spot at the charging port, making me wonder if they designed the charging board with sufficient trace thickness and width to handle the charging current.
Overall, I’m disappointed at the quality. I wish there were a similar clawbot design to gen1, which looks like it works (seen once in a mock competition).
I considered buying the competition kit later for $200 but with such weak motors, jerky control routines, and bot designs, I wonder if it’d be a lost cause. Anyone sharing successes or tricks would be appreciated.