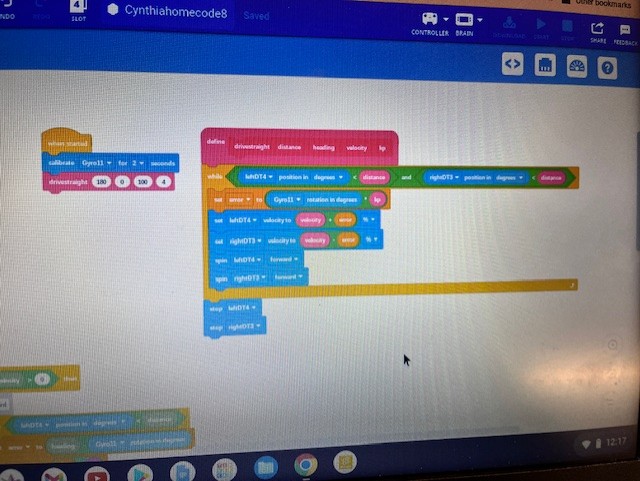
We changed out our geared up Drivetrain to the Herobot Swish. We copied the code from a teacher workshop on youtube:
")
Our code matches the tutorial at 26:40
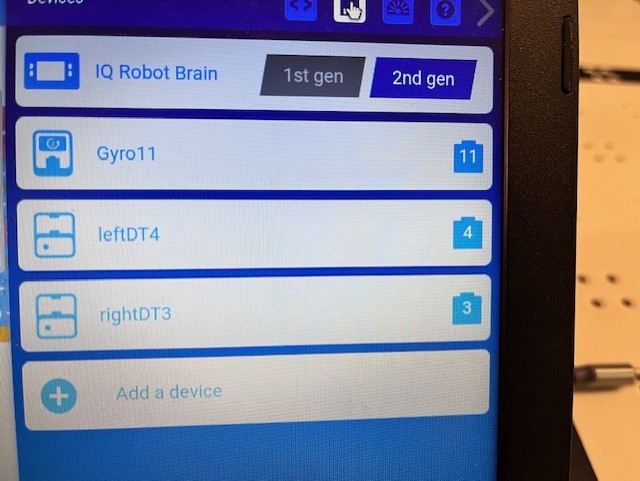
our devices are configured as such
and our robot looks like this

The intake rollers are the front of the robot. At the top of the front I have added the gyro sensor.
No matter what input we put into the My Block - the robot slowly starts backwards, then veers to the right and hits the field wall. What on earth are we doing wrong. we have tried everything:
- changing the directionality of the DT motors
- swapping the addition and subtraction in the while loop
- setting motors to zero degrees after calibration
- changing distance input
- moving the gyro to the back, the side, the middle, upsidedown
- changing the input to turns instead of rotations then adapting the code to reflect turns
- swapping the directionality of the DT code from forward to reverse
- adding a backward while loop in addition to the forward while loop
everything ends with the robot veering left or right or spinning.
We have tried the code on a basebot and it works perfectly. What is wrong with our robot that it makes the DT veer off to the side?