Welcome to the community!
Thank you!
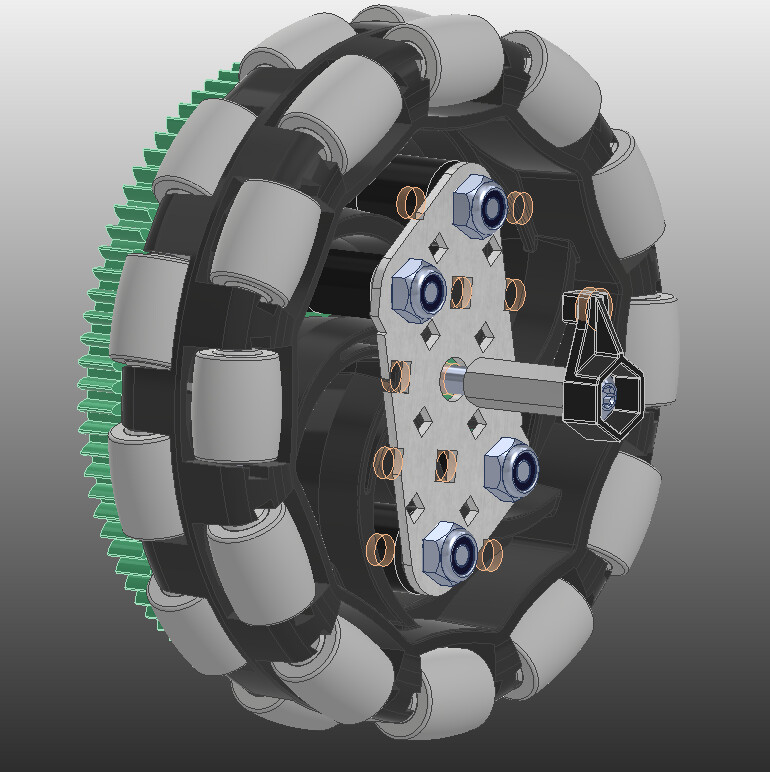
These are called screw joints. The keps nut is tightened to the inner channel, and the standoff is tightened to the outer channel. If the space between the keps nut and standoff is greater then your wheel assembly, it’ll be low friction and free spin. If your keps nut / standoff are tight, then nothing should come loose.
When building a drive, if you just screw the drive pontoons (“pontoon” refers to the inner and outer drive channel as an assembly) to your cross brace, you’ll find that the drive pontoons don’t want to stay square. This is because screws don’t fit perfectly in the square holes of c-channels. This can be mitigated by using shoulder screws, but doesn’t entirely fix it. (it’s good practice to use shoulder screws though)
Having something that ensures the distance between the inner and outer drive channel is the same all the way across is essential for your drive to have low friction. If they aren’t, then anything you build on top of that risks not being square and your drive axels increase in friction or will struggle to drive straight.
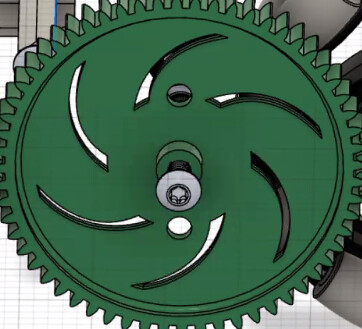
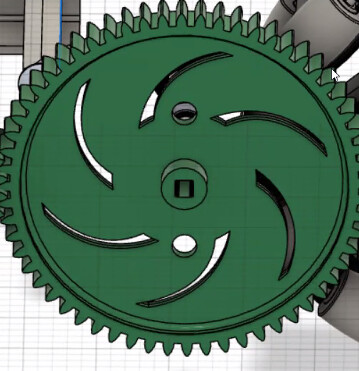
Usually this is done by having standoffs that go between the inner and outer channel, but when you run gears all the way along the drive you lose a lot of holes to put standoffs. By using this style of screw joint for the wheels and unpowered idler gears, the joints are keeping the inner and outer drive square.
When putting standoffs inside of drive pontoons, the spacing is never a clean standoff size. It’s always a size down standoff from what almost fits, a spacer and some washers. This changes a bit if you’re using steel or aluminum, mixing both, or the direction of your drive channels, so be sure to check CAD for your setup to get as close as you can to the correct spacing.
Before I mount the outer channel, I tighten all my long screws to the inner channel. I’ll make one wheel assembly with some spacing, put the standoff on loose, then attach my outer channel. At this point, only 1 wheel is mounted, and I see if everything lines up and if my spacing is correct (it never is first try). After the spacing is good, I’ll mount all of my wheels.
When tightening the standoff, it’s important to tighten it to the outer channel, using pliers or a wrenchy wrench. If you don’t, it’ll tighten to the wheel stop it from spinning. A bit of purple Loctite on the screw between the outer channel and standoff will help make sure that screw doesn’t come loose and is still removable for drive maintenance.
The keps nut on the inside shouldn’t come loose if tightened enough, but this can be replaced with a locknut (normal or thin) and then definitely won’t come loose.