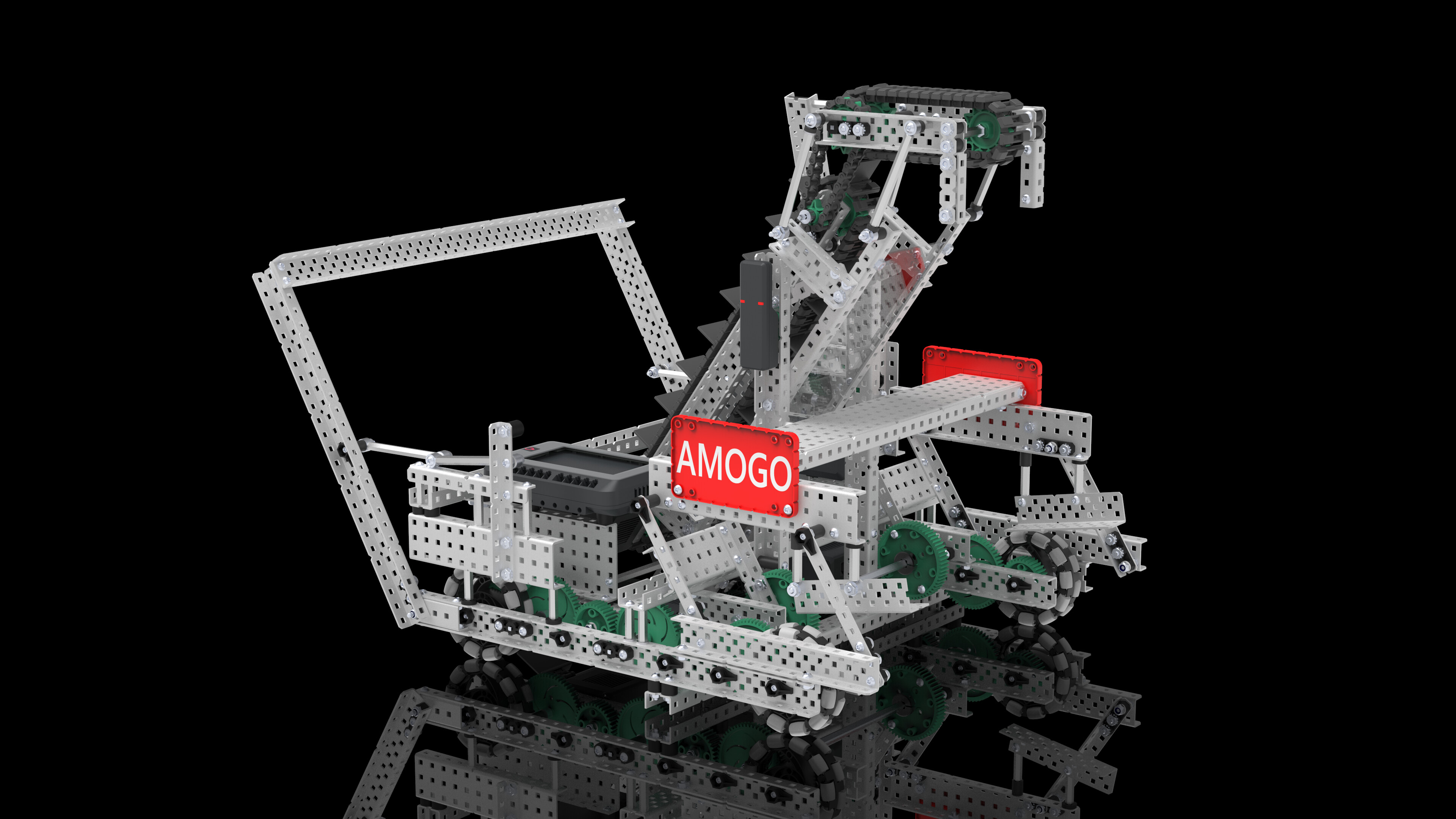
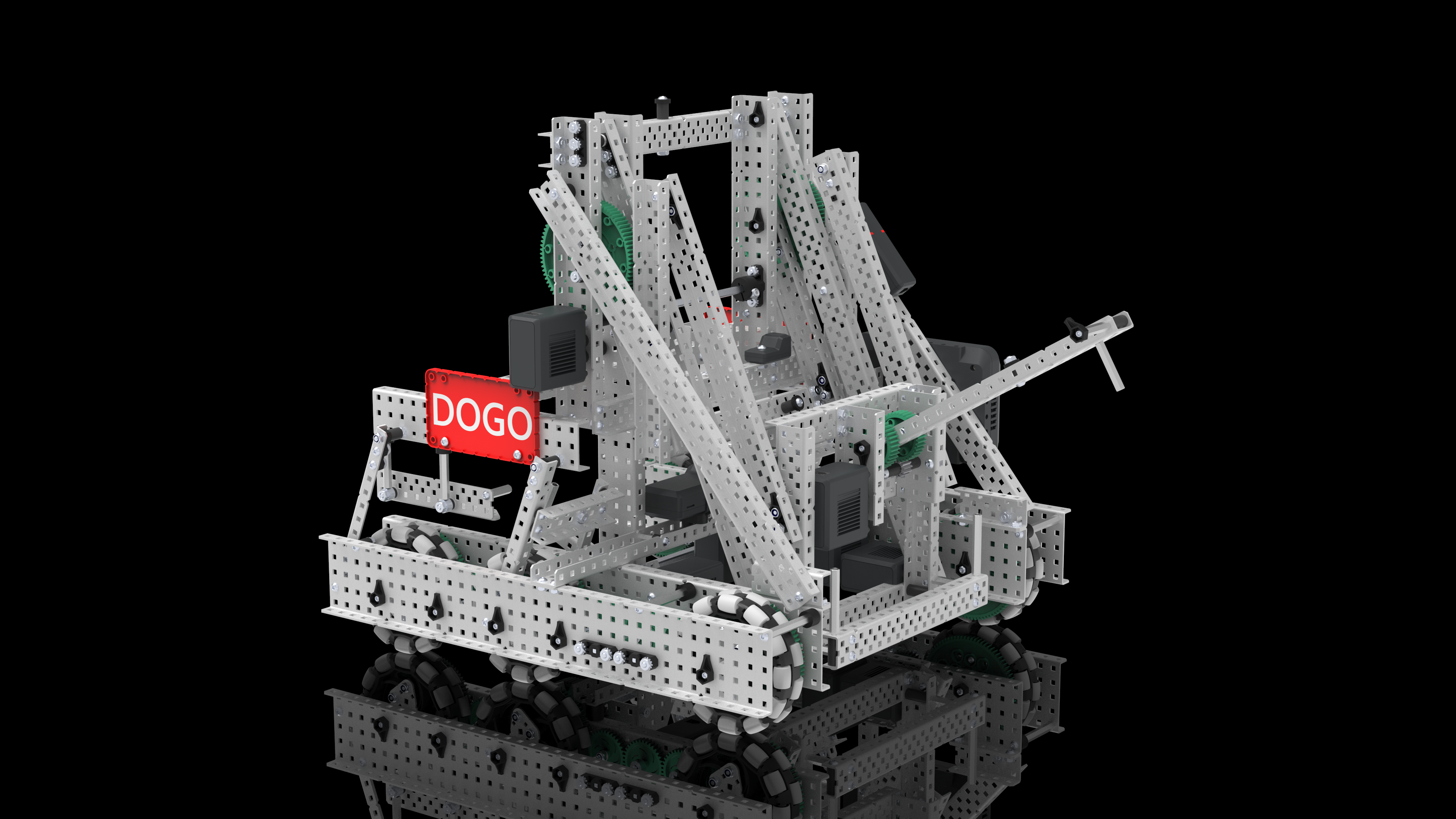
Harvard-Westlake Robotics is proud to announce two robots, AMOGO and DOGO! These robots are simple, competitive designs for VEX Robotics Competition Tipping Point, inspired by the 118 Everybot.
AMOGO (alliance mobile goal) is a ring focused robot that can fill a goal with rings in autonomous, hold an alliance mobile goal, platform, lift tipped mobile goals, and hold a neutral goal to the side of the robot.
DOGO (double mobile goal) is a mobile goal focused robot that can place goals on platforms without climbing, steal goals from opponent platforms and robots, hold two mobile goals at once, and steal opponents alliance goals.
that goal grabber on the lift bot is actually genius. Great stuff all around.
I think the matches you’ve shown are the first glimpse we’ve had at the potential ring scoring has. In all 2 matches, dogo had superior control over the goals, and was able to score a majority of them both in their home zone and their platform. But amogo was still able to win 2 of the matches by filling the alliance goals with rings, which really goes to show that it’s not actually hard to win matches if your opponent has more goals than you, rings can easily overcome that point deficit.
These look amazing, if a little more capable than the standard Everybot Great work and thanks for creating such a complete set of resources. I hope teams choose to use this as [a little more than] a starting point .
One question: can AMOGO park on the platform while holding its second goal? I think anyone could build this and stay competitive throughout the season with just that small upgrade if not.
I’m just curious- we’re just getting back together as a team at Windward and we’re looking for competitions and/or scrimmage partners.
Would you guys be interested in a friendly scrimmage? (We will likely field 5-6 teams, but we won’t start till end of August). We’d gladly make the trip to you or host.
Hi Calamity3324B - looks like we should take this discussion elsewhere. - please look me up at Windward School. I’m Simon, the STEAM Director. Let’s talk.
Thank you for all the work that you put into these robots, and especially for posting the CAD models. I’ve been trying to get my students to use CAD for a few years, without much luck. I took your STEP files, imported them into Onshape, cleaned up some conversion issues, and then showed the kids where they were. Within a few minutes, I had ten kids using CAD for the first time. They still need to make the leap from looking at CAD to creating their own designs in it, but it’s a start.
In addition to learning CAD, they are picking up a lot of new building techniques. However, they did have some questions that I couldn’t answer and they are kind of young to be posting on the forum. Here are their questions regarding AMOGO:
The model shows a 1.5" bolt for the wheel axles, which means it is just slightly too short to attach to the standoff on the other side. Is that intentional? They are using a 1.75" bolt instead.
The screw axle fits tightly and is difficult to turn. Is that also intentional? They are filing down the threads on the screws where they go through the gear and wheel.
Thanks again!
Onshape users - here are links to the Onshape versions of the CAD models. These versions will perform much better than straight imports of the STEP files.
AMOGO: Onshape
DOGO: Onshape
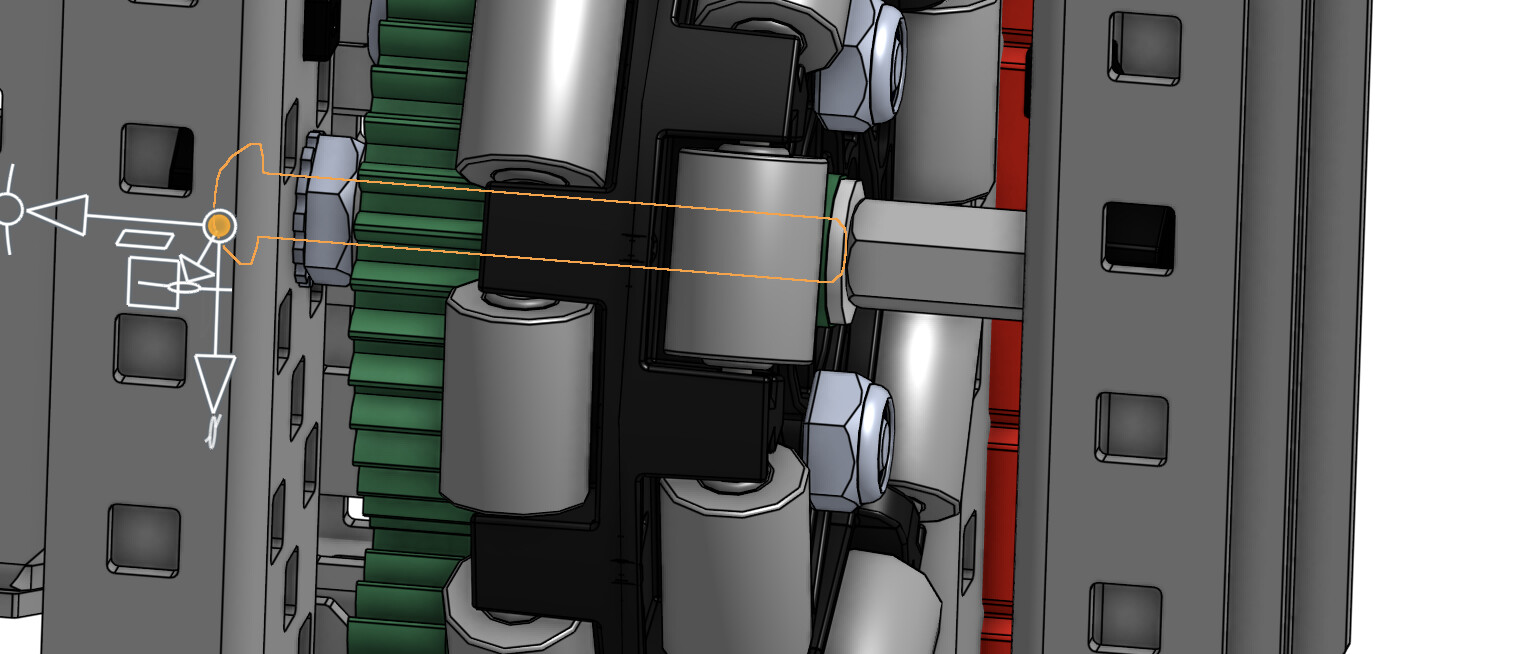
Hex screws are thicker then star screws. Circular inserts spin on star screws much easier then hex screws. If using hex screws, either drill the green insert with a #19 drill bit or near size. In the wheel assembly, make sure there’s only 2 green inserts, both on the outer sides of the wheels. Having more points of contact increases the likelihood that they aren’t aligned, and increases friction.
Make sure that the standoff is tightened to the outer channel, the screw is tightened to the inner channel, and there’s enough space in the middle for the wheel to spin nicely.
Thank you for publishing these! And thank you for using these robots to teach students new building techniques
Awesome that these are being used to teach students. That is why we got into this.
One question about the screw joint with the 4" wheels. In your cad, it goes 2" screw with keps, through wheel, washer, standoff to c-channel. We built most of our screw joints with Screw, keps, through wheel,washer and then nylock to hold in place and then standoff. Does it stay in place without the nylock?