So, my team and I have built the reverse double 4 bar lift, but we can’t seem to figure out how to attach it to the robot properly and get it to work smoothly. Suggestions?
Do you have any pictures for reference?
It’s a little different because this example is for a 4-bar, but this thread may help:
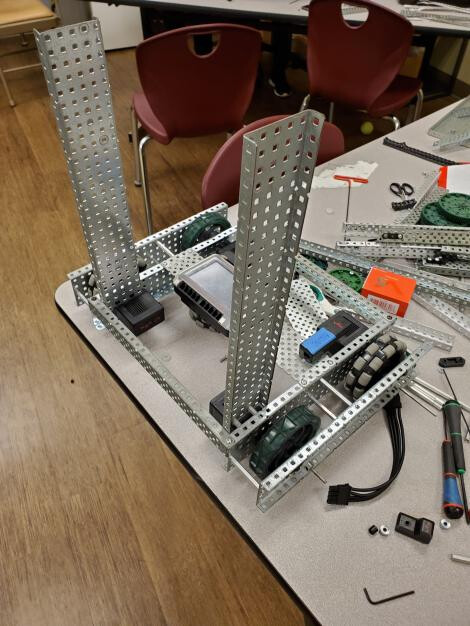
What exactly are you having issues with? You seem to have figured out mounting your lift towers to your base. Do you have a fully built dr4b that you need to attach, or are you trying to build one starting from your base?
Also I would recommend having some triangle bracing on your lift towers to stop them from being able to flex around.
If you’re looking for general dr4b building tips check out this guide:
We have a fully build dr4b that we need to attach, but cant figure out how.
use triangle bracing to eliminate forward and backward movement, and use bracing for the dr4b to eliminate side to side movement
A few small suggestions. Why 5-wide? 2’s take up less space, have middle holes that 5’s don’t (making them easier to brace like mason suggested), weigh less, and in the case of a db4 tower, don’t give up any structural integrity.
another reason to use 2-wides is you can use U-channel mounts, if you have any U-channel.
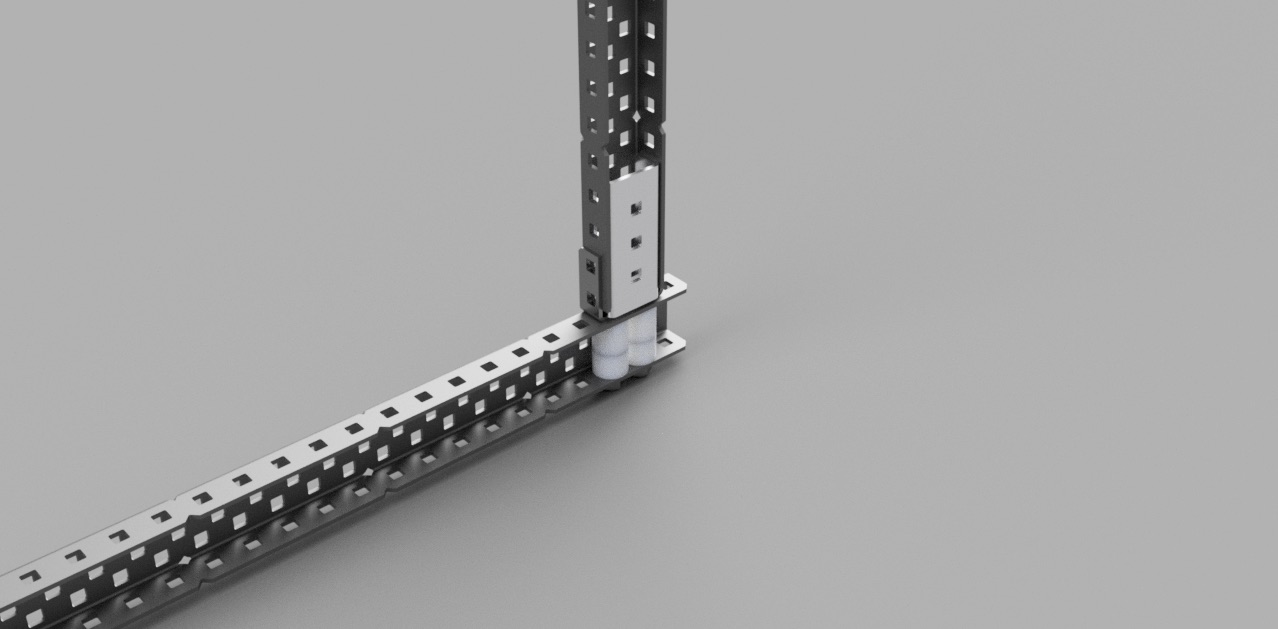
They’ve very nice, because the towers will be on-hole, meaning you can put a crossbar between them and the holes will line up.
we will try this, thanks!