VEX Forum
How to code inertial sensor in block code?
Programming Support
VEXcode V5 Tech Support
sensors
kno192
February 15, 2025, 8:15pm
1
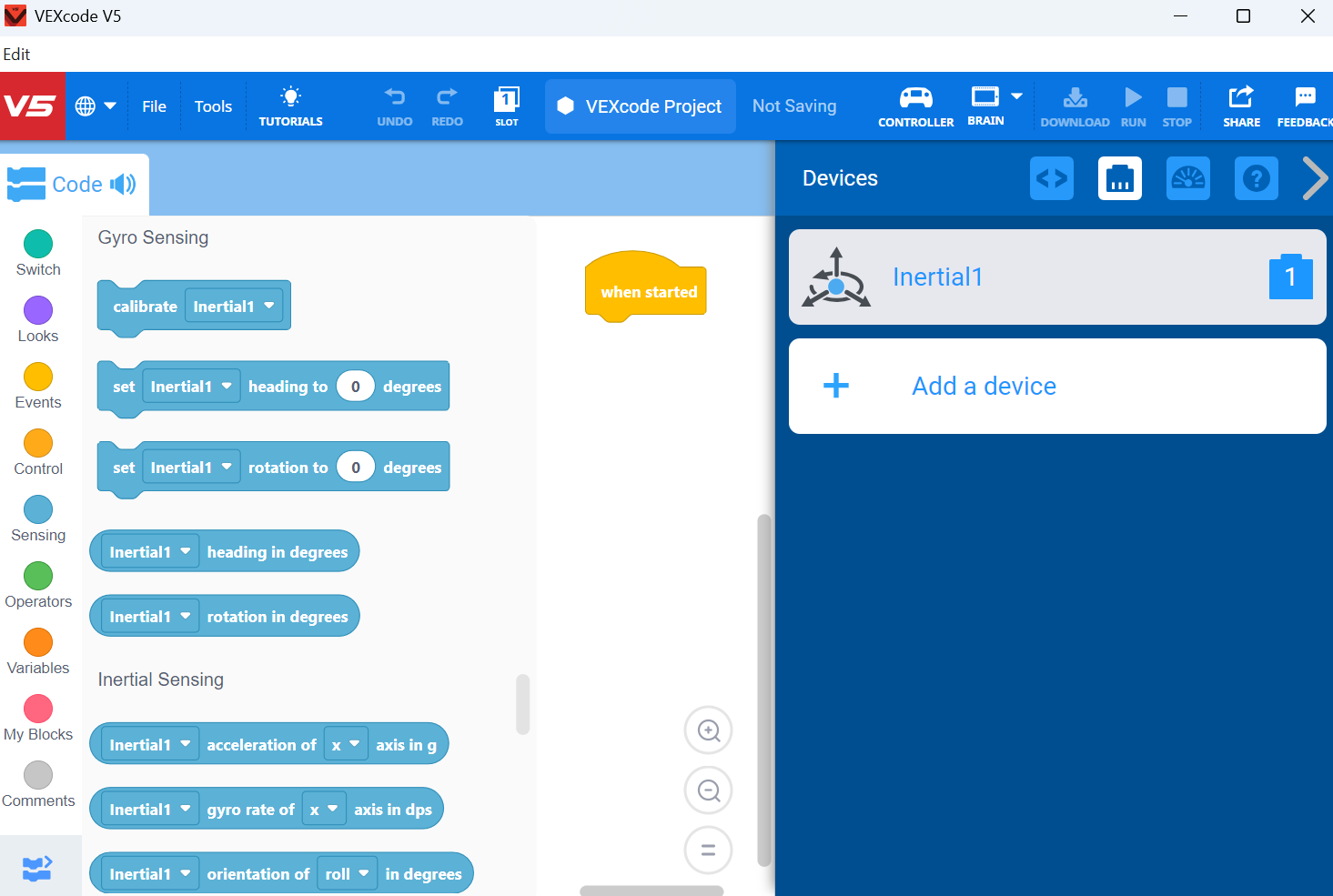
How to code inertial in blocks I am new to VRC.
rs1
February 15, 2025, 11:16pm
2
image
1465×985 82.7 KB
https://api.vex.com/v5/home/blocks/sensing/inertial_sensing.html
More specific questions?