I have not done any 3D printing yet, but it looks interesting. I have built a two motor rover I like, and am wondering about creating a chassis for it using 3D printing. The question I have is how one should go about mounting the motors. Would the motors be held securely enough if they were just snapped into place, or should they be put in place, and then held in with connector pins and right angle pieces?
I looked around on Thingiverse and saw some nice Vex EDR chassis, but I did not see that anyone had published a chassis for the Vex IQ motors and brain.
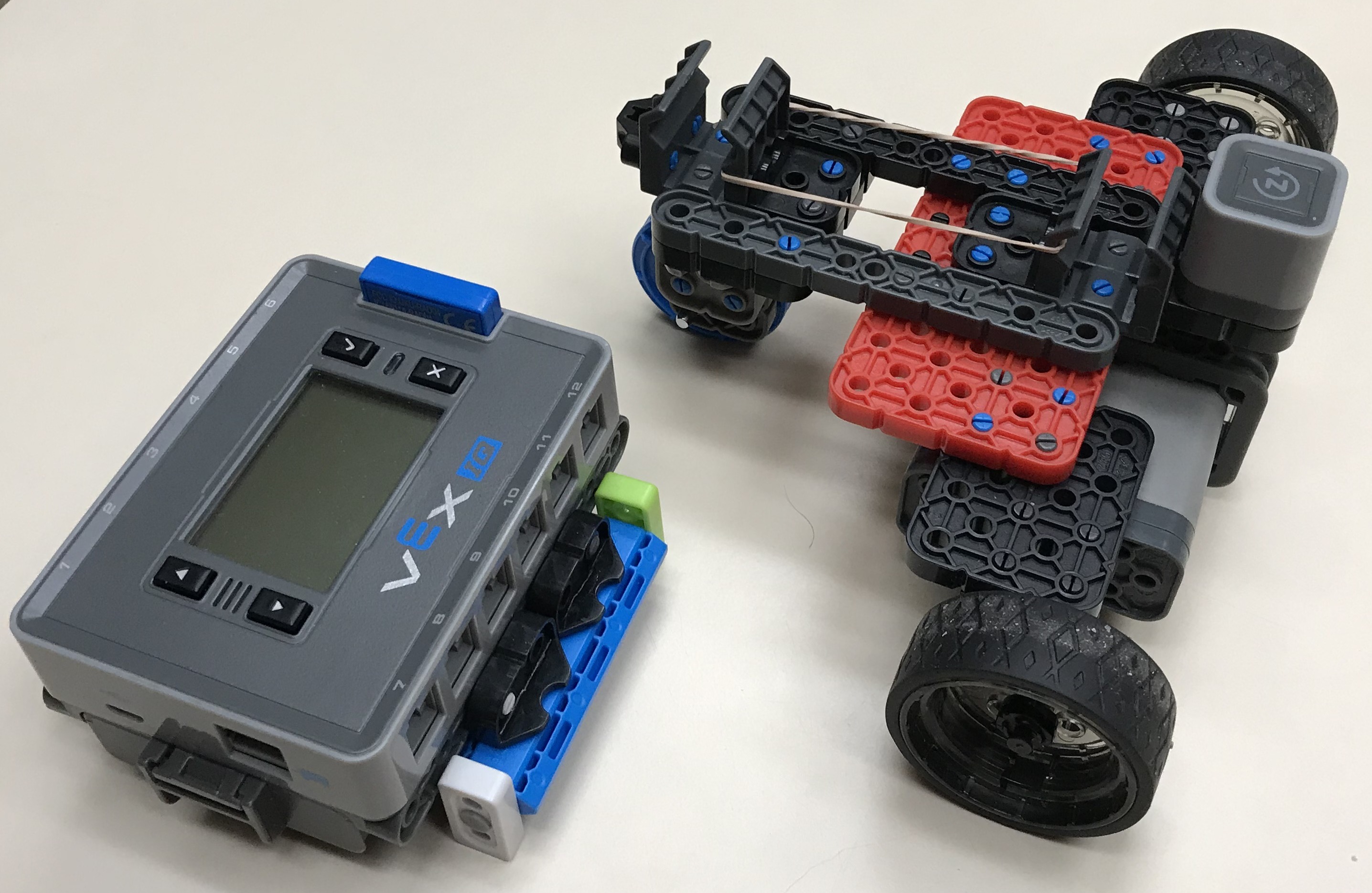
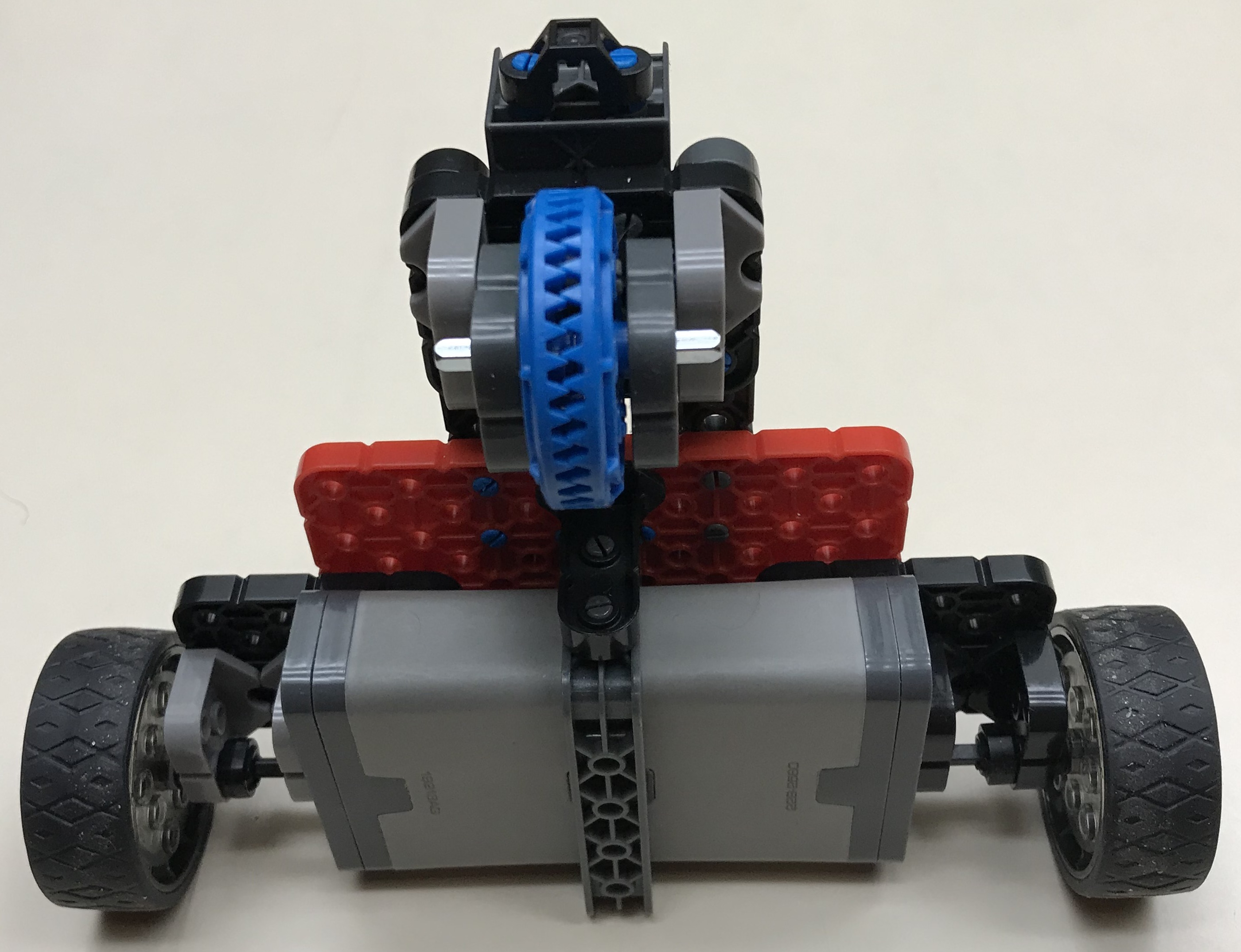
Here are a couple of pictures that show how I assembled my rover using standard Vex IQ parts:
It’s possible to print so the pins hold, but I’ve found that to be a problem.
My two solutions are:
Print the thickness of the part to match the thickness of the IQ part.
Use a 1x2 pin, the 1 into the motor, the 2 though the printed part
then use a real VEXIQ plate to lock it into place.
Second solution is to use 0x2 pins then push them from the outside through the printed part and into the motor. Depending on how good your part is printed you may get a little wiggle. One of the thin washers may help lock it into place.
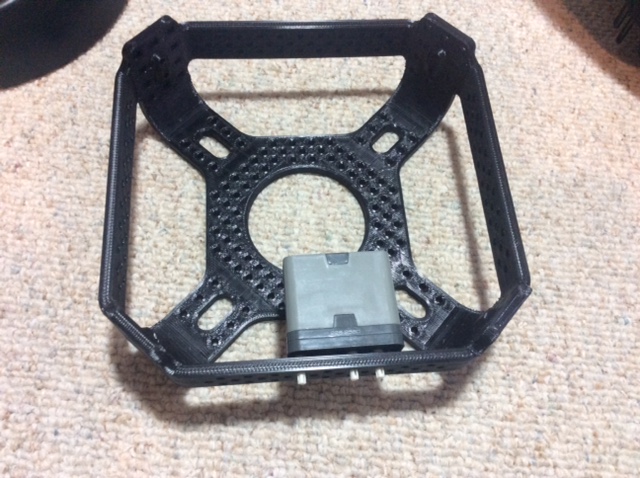
Your part looks interesting. It looks like a chassis that could be used for regular wheels, or maybe omni wheels. Can you mount the motors on the 45 degree part?
Yes, the idea was to be able to make it a holonomic base in a “X” config. While most of the print has the 1/2" offset hole pattern, the corners are just a 1/2" rectangular holes (3 across 4 up/down) This let me do both IQ motors (3 pins + axle) vertical config or EDR motors (2 bolts + axle) either in a vertical or horizontal config. I’ve built both styles, I like the small omni wheels for the EDR version, but it really scoots with the bigger omni.
Original design is by Cody, a long time forum member and roboteer. It’s 8.5" across, so it would be a good size for the VEXU 12x12 robot. The print time was pretty long with the high infill rate.
You could also use shaft collars on the pin that sticks out. I suggest that a lot when they are building arms and dr4b’s… For when you want the pin to NEVER COME OUT!!!