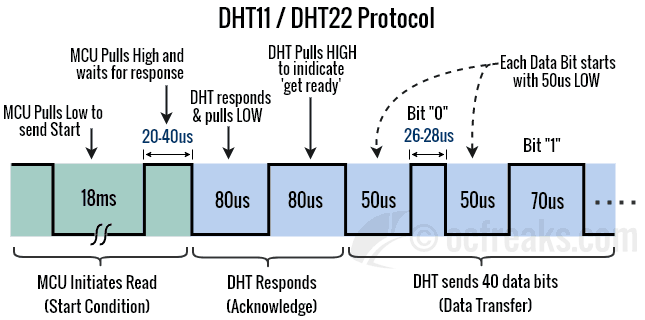
25-80us bit timing is well below the 10ms minimum delay that legacy port co-processor has in communicating with V5 main processor.
@MiPlayer123, can you tell us more about what you need to build at the end?
There are options to drive VEX based robot without the need V5 or even Cortex. For example, we built several robots where we could drive legacy 393 motors directly with Arduino or ESP8266 boards: Inexpensive control system for teams without access to Cortex / V5 off-season