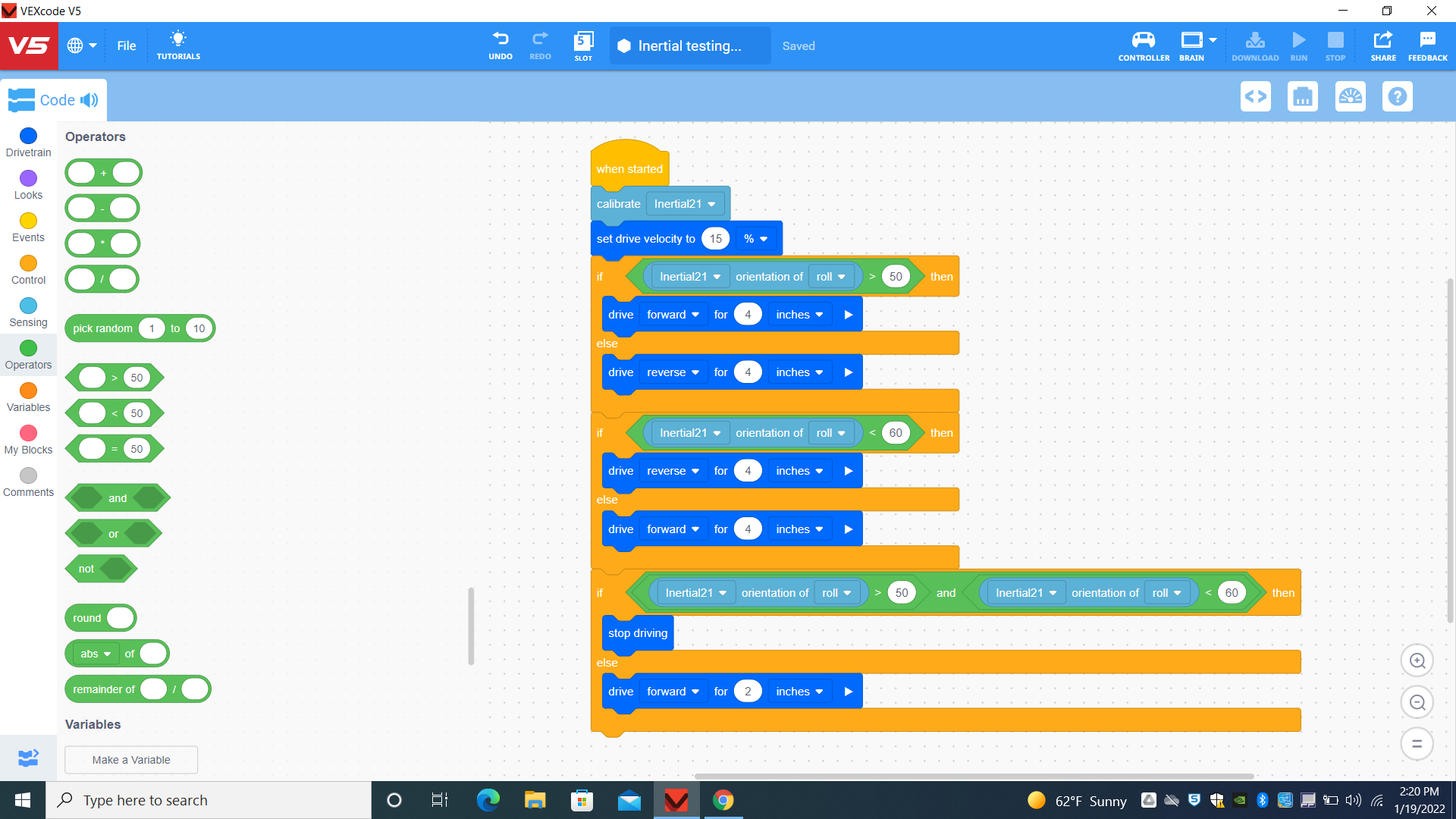
Hello, I am trying to code an inertial sensor for auton skills in tipping point and am wondering how you would use the code to balance on the platform autonomously. I made a draft code for it that basically is an if, then statement saying if the orientation of roll is greater than/less than a certain value then it will drive forward/backwards. Would the code I made hypothetically work or is it coded in a different way. The values I have are not measured and not anywhere near precise, just some blocks I put in trying to figure it out. Also, is there a way to print the Z axis so I can measure and test the orientation numbers I need? Thanks in advance. Here’s my code;