Understandably, this task would likely be easier in text, but I would really like to keep the consistency of blocks all around. The current task is trying to use the inertial sensor to turn a certain amount of degrees. I can’t for the life of me get the robot to stop spinning drivetrain motors once it reaches however many degrees I want rotated. I used some example code from Vex IQ folks and went to see if it would work with V5. Obviously it didn’t work, so I would really like some help here. ![]()
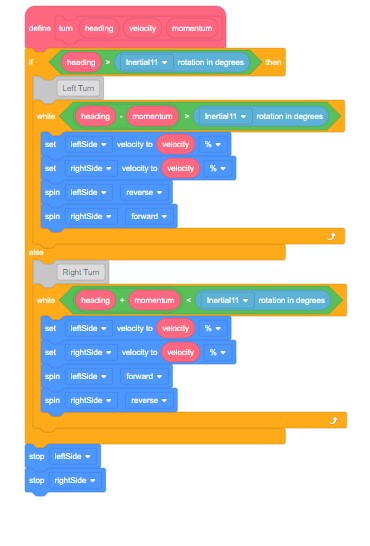
This is what I have so far: