I’ve been having issues with my code when using the vex code extension for Visual Studio Code. My issue is that when I click the download and build button it downloads onto the controller but then no buttons work. Any help is appreciated, Thanks.
Hey @Thoman ,
Which Controller are you using? V5, EXP, or IQ2?
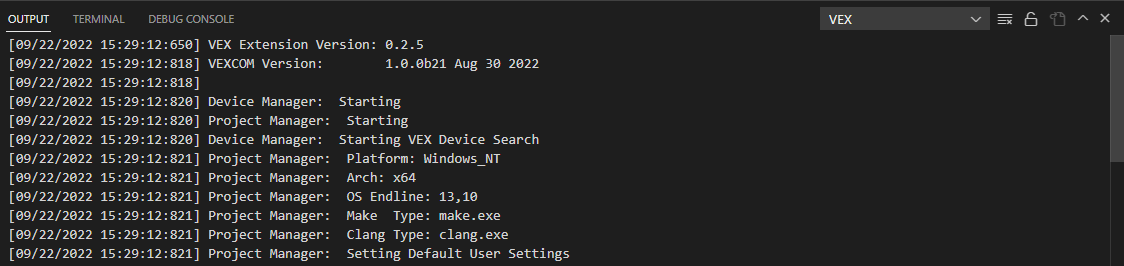
Can you duplicate this situation and then send me the extension log?
You can find the log by following these steps:
- Clicking Output

- Click the drop down box, and select the text “VEX”
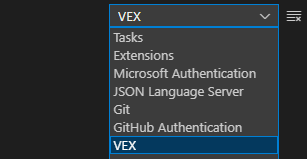
- Copy the output log and send it to me.
Thanks!
Can you attach or post the full log in a code block like so:
[02/14/2023 10:04:34:634] VEX Extension Version: 0.3.0
[02/14/2023 10:04:34:897] VEXCOM Version: 1.0.0b21 Aug 30 2022
[02/14/2023 10:04:34:897]
[02/14/2023 10:04:34:899] Device Manager: Starting
[02/14/2023 10:04:34:899] Project Manager: Starting
[02/14/2023 10:04:34:900] VEX Websocket Server: VEX Websocket Server Initialized
[02/14/2023 10:04:34:901] Device Manager: Starting VEX Device Search
[02/14/2023 10:04:34:904] Project Manager: Platform: Windows_NT
[02/14/2023 10:04:34:904] Project Manager: Arch: x64
[02/14/2023 10:04:34:904] Project Manager: OS Endline: 13,10
[02/14/2023 10:04:34:904] Project Manager: Make Type: make.exe
[02/14/2023 10:04:34:904] Project Manager: Clang Type: clang.exe
[02/14/2023 10:04:34:904] Project Manager: Setting Default User Settings
[02/14/2023 10:04:35:422] Project Manager: Checking if toolchain exist-------------
[02/14/2023 10:04:35:422] Project Manager: Toolchain Found @: c:\Users\halen_phillips\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\tools\cpp\toolchain_win32
[02/14/2023 10:04:35:422] Project Manager: Project Home Path: c:\Users\halen_phillips\Documents\vex-vscode-projects
[02/14/2023 10:04:35:422] Project Manager: Toolchain Home: c:\Users\halen_phillips\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\tools\cpp
[02/14/2023 10:04:35:422] Project Manager: Toolchain Path: c:\Users\halen_phillips\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\tools\cpp\toolchain_win32
[02/14/2023 10:04:35:422] Project Manager: Sdk CPP Home: c:\Users\halen_phillips\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\sdk\cpp
[02/14/2023 10:04:35:422] Project Manager: Sdk Python Home: c:\Users\halen_phillips\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\sdk\python
[02/14/2023 10:04:35:422] Project Manager:
[02/14/2023 10:04:35:422] Project Manager: Looking for Projects in workspace ----------------
[02/14/2023 10:04:35:422] Project Manager: WS Folder is not a VEX Project: [object Object]
[02/14/2023 10:04:35:422] Project Manager: No VEX Projects found in workspace
[02/14/2023 10:04:36:065] V5: {"local":{"latest":"VEXOS_V5_1_1_2_0","catalog":["VEXOS_V5_1_1_2_0"]},"online":{"latest":"VEXOS_V5_1_1_2_0"}}
[02/14/2023 10:04:36:065] IQ2: {"local":{"latest":"VEXOS_IQ2_1_0_6_0","catalog":["VEXOS_IQ2_1_0_6_0"]},"online":{"latest":"VEXOS_IQ2_1_0_6_0"}}
[02/14/2023 10:04:36:065] EXP: {"local":{"latest":"VEXOS_EXP_1_0_2_0","catalog":["VEXOS_EXP_1_0_2_0"]},"online":{"latest":"VEXOS_EXP_1_0_2_0"}}
[02/14/2023 10:04:36:065] EXP: Latest vexos file available locally
[02/14/2023 10:04:36:065] IQ2: Latest vexos file available locally
[02/14/2023 10:04:36:065] V5: Latest vexos file available locally
[02/15/2023 09:34:29:752] Device Manager:
[02/15/2023 09:34:29:752] Device Manager: VEX V5 Controller Detected
[02/15/2023 09:34:29:752] Device Manager: ---------------------------------------------
[02/15/2023 09:34:29:752] Device Manager: -(User)
[02/15/2023 09:34:29:752] Device Manager: -(Communication) COM13
[02/15/2023 09:34:29:752] Device Manager:
There is more version information that I need to see that will help me reproduce your issue, such as extension version ect.
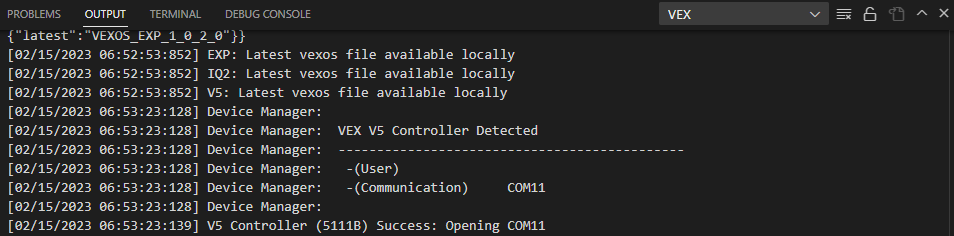
Can you plugin your controller and perform a download that causes your controller buttons not work. I would like to verify that there wasn’t an issue with the user program download.
Then send me the full log.
Can you also zip the project up with your code and attach it here as well.
Thanks!
Here is the full extension log
[02/16/2023 07:12:50:420] VEX Extension Version: 0.3.0
[02/16/2023 07:12:50:523] VEXCOM Version: 1.0.0b21 Aug 30 2022
[02/16/2023 07:12:50:523]
[02/16/2023 07:12:50:525] Device Manager: Starting
[02/16/2023 07:12:50:525] Project Manager: Starting
[02/16/2023 07:12:50:525] VEX Websocket Server: VEX Websocket Server Initialized
[02/16/2023 07:12:50:526] Device Manager: Starting VEX Device Search
[02/16/2023 07:12:50:527] Project Manager: Platform: Windows_NT
[02/16/2023 07:12:50:527] Project Manager: Arch: x64
[02/16/2023 07:12:50:527] Project Manager: OS Endline: 13,10
[02/16/2023 07:12:50:527] Project Manager: Make Type: make.exe
[02/16/2023 07:12:50:527] Project Manager: Clang Type: clang.exe
[02/16/2023 07:12:50:527] Project Manager: Setting Default User Settings
[02/16/2023 07:12:50:913] Project Manager: Checking if toolchain exist-------------
[02/16/2023 07:12:50:914] Project Manager: Toolchain Found @: c:\Users\24allegrettad\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\tools\cpp\toolchain_win32
[02/16/2023 07:12:50:914] Project Manager: Project Home Path: c:\Users\24allegrettad\Documents\vex-vscode-projects
[02/16/2023 07:12:50:914] Project Manager: Toolchain Home: c:\Users\24allegrettad\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\tools\cpp
[02/16/2023 07:12:50:914] Project Manager: Toolchain Path: c:\Users\24allegrettad\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\tools\cpp\toolchain_win32
[02/16/2023 07:12:50:914] Project Manager: Sdk CPP Home: c:\Users\24allegrettad\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\sdk\cpp
[02/16/2023 07:12:50:914] Project Manager: Sdk Python Home: c:\Users\24allegrettad\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\sdk\python
[02/16/2023 07:12:50:914] Project Manager:
[02/16/2023 07:12:50:914] Project Manager: Looking for Projects in workspace ----------------
[02/16/2023 07:12:50:920] Project Manager: Project found: Vex-22-23-remake
[02/16/2023 07:12:50:926] Project Manager: Checking for latest Stubs-------------
[02/16/2023 07:12:51:999] Project Manager: Stubs Versions Recieved
[02/16/2023 07:12:51:999] Project Manager: Online Stubs: V5_1_0_1_14
[02/16/2023 07:12:51:999] Project Manager: Local Stubs : V5_1_0_1_14
[02/16/2023 07:12:51:999] Project Manager: Stubs Found @: c:\Users\24allegrettad\AppData\Roaming\Code\User\globalStorage\vexrobotics.vexcode\sdk\python ver:V5_1_0_1_14
[02/16/2023 07:12:51:999] Project Manager: Stubs - Up To Date
[02/16/2023 07:12:52:407] V5: {"local":{"latest":"VEXOS_V5_1_1_2_0","catalog":["VEXOS_V5_1_1_2_0"]},"online":{"latest":"VEXOS_V5_1_1_2_0"}}
[02/16/2023 07:12:52:407] IQ2: {"local":{"latest":"VEXOS_IQ2_1_0_6_0","catalog":["VEXOS_IQ2_1_0_6_0"]},"online":{"latest":"VEXOS_IQ2_1_0_6_0"}}
[02/16/2023 07:12:52:407] EXP: {"local":{"latest":"VEXOS_EXP_1_0_2_0","catalog":["VEXOS_EXP_1_0_2_0"]},"online":{"latest":"VEXOS_EXP_1_0_2_0"}}
[02/16/2023 07:12:52:407] EXP: Latest vexos file available locally
[02/16/2023 07:12:52:407] IQ2: Latest vexos file available locally
[02/16/2023 07:12:52:407] V5: Latest vexos file available locally
[02/16/2023 07:13:02:756] Device Manager:
[02/16/2023 07:13:02:756] Device Manager: VEX V5 Controller Detected
[02/16/2023 07:13:02:756] Device Manager: ---------------------------------------------
[02/16/2023 07:13:02:756] Device Manager: -(User)
[02/16/2023 07:13:02:756] Device Manager: -(Communication) COM18
[02/16/2023 07:13:02:757] Device Manager:
[02/16/2023 07:13:02:767] V5 Controller (5111B) Success: Opening COM18
[02/16/2023 07:13:08:187]
[02/16/2023 07:13:08:187] Python Build Btn Sequence
[02/16/2023 07:13:08:256] [Command]: User Port - Result - (0) VEX Success | vexcom.exe --quiet --user COM18
[02/16/2023 07:13:09:052] [Command]: System Info - (0) VEX Success | vexcom.exe --json COM18
[02/16/2023 07:13:09:056] [Command]: Download User Program
[02/16/2023 07:13:11:435] [Command]: User Program Download - (0) VEX Success | vexcom.exe --name "Vex-22-23-remake" --slot 1 --write "c:\Users\24allegrettad\Documents\vex-vscode-projects\Vex-22-23-remake\src\main.py" --progress --json --chan 1 --progress --description VGhlIHJlbWFrZSBvZiB0aGUgdmV4IGNvZGUgSSB1c2VkIGZvciB0aGUgMjAyMi0yMDIzIHllYXI= COM18
For the code I am not able to upload because I am a new user, but if you want I can attach it as a a code block.
Thanks!
Thanks for sending the log!
Yeah no worries, a code block works as well, thanks!
Just to clarify, do you mean buttons don’t work in VS Code or the buttons on the controller don’t work (that is, your code doesn’t work) ?
So when I download it onto the controller from VS Code it doesn’t work, but when I use the vex editor they work fine so I don’t believe it’s an issue with the code itself
It should work just the same if it’s Python.
A couple more simple questions
Is the controller is linked to the V5 brain when you do this ?
( as you keep saying that code is downloaded onto the controller, technically all code is downloaded to the V5 brain, the controller just allows wireless download )
Does a new Python project that just prints something to the brain screen work ?
Did you setup the controller graphically in VEXcode and directly assign motors to it ? Did the auto generated code that VEXcode creates in this case get imported into the VS code project ?
Does the code work if you download to the V5 brain using a USB cable connected to it ?
The controller is linked to the brain when I download it.
I haven’t tried printing something on the brain screen and I can’t try because I’m not at school currently.
I have tried just copying the entire code from VEXcode to VS code to download it and I did assign the motors directly to the controller and I also tried doing it where I don’t assign the motors in the graphical interface. Neither worked. When I copied the code from the VEXcode editor to VS code I made sure to copy the auto generated code as well.
I haven’t tried to the download the code directly to the brain and I cannot try now because I am not at school.
This is the code:
# ---------------------------------------------------------------------------- #
# #
# Module: main.py #
# Author: tcsha #
# Created: 2/13/2023, 10:18:56 PM #
# Description: V5 project #
# #
# ---------------------------------------------------------------------------- #
# Library imports
from vex import *
# Brain should be defined by default
brain = Brain()
# Config the robot
controller_1 = Controller(PRIMARY)
left_drive_smart = Motor(Ports.PORT17, GearSetting.RATIO_18_1, False)
right_drive_smart = Motor(Ports.PORT20, GearSetting.RATIO_18_1, False)
drivetrain = DriveTrain(
left_drive_smart, right_drive_smart, 319.19, 295, 40, MM, 1)
main_intake = Motor(Ports.PORT12, GearSetting.RATIO_18_1, False)
roller_intake = Motor(Ports.PORT18, GearSetting.RATIO_18_1, False)
Intake = MotorGroup(main_intake, roller_intake)
setter = Motor(Ports.PORT19, GearSetting.RATIO_6_1, False)
# Configure the vision sensor
vision_sensor = Vision(Ports.PORT11, 50)
launcher_pt1 = Motor(Ports.PORT15, GearSetting, GearSetting.RATIO_6_1, True)
launcher_pt2 = Motor(Ports.PORT13, GearSetting, GearSetting.RATIO_6_1, False)
launcher = MotorGroup(launcher_pt1, launcher_pt2)
expansion = Motor(Ports.PORT14, GearSetting.RATIO_18_1, False)
randombsthingforethan = Motor(Ports.PORT16, GearSetting.RATIO_18_1, False)
wait(30, MSEC)
controller_1_left_shoulder_control_motors_stopped = True
controller_1_right_shoulder_control_motors_stopped = True
controller_1_up_down_buttons_control_motors_stopped = True
drivetrain_needs_to_be_stopped_controller_1 = False
# Controller input define for tasks
def rc_auto_loop_function_controller_1():
global drivetrain_needs_to_be_stopped_controller_1, controller_1_left_shoulder_control_motors_stopped, controller_1_right_shoulder_control_motors_stopped, controller_1_up_down_buttons_control_motors_stopped, remote_control_code_enabaled
while True:
if remote_control_code_enabaled:
#calculate the drivetrain motor velocities from the controller joystick axies
#left = axis3 + axis4
#right =axis3 +axis4
drivetrain_left_side_speed = controller_1.axis3.position() + controller_1.axis4.position()
drivetrain_right_side_speed = controller_1.axis3.position() - controller_1.axis4.position()
#check if the values are inside of the deadband range
if abs(drivetrain_left_side_speed) < 5 and abs(drivetrain_right_side_speed) < 5:
if drivetrain_needs_to_be_stopped_controller_1:
#stop the drive stuff
left_drive_smart.stop()
right_drive_smart.stop()
#tell the code the motors have been stopped
drivetrain_needs_to_be_stopped_controller_1 = False
else:
#rest the toggle so that the deadband code knows to stop the motors next time the input is in the deadband range
drivetrain_needs_to_be_stopped_controller_1 = True
#only tell the left drive motor to spin if the values are not in the deadband range
if drivetrain_needs_to_be_stopped_controller_1:
left_drive_smart.set_velocity(drivetrain_left_side_speed, PERCENT)
left_drive_smart.spin(FORWARD)
#same thing but for the right side drive
if drivetrain_needs_to_be_stopped_controller_1:
right_drive_smart.set_velocity(drivetrain_right_side_speed, PERCENT)
right_drive_smart.spin(FORWARD)
#check the L1/L2 buttons
if controller_1.buttonL1.pressing():
launcher.spin(FORWARD)
controller_1_left_shoulder_control_motors_stopped = False
elif controller_1.buttonL2.pressing():
launcher.spin(REVERSE)
controller_1_left_shoulder_control_motors_stopped = False
elif not controller_1_left_shoulder_control_motors_stopped:
#sets a toggle so we don't have to constantly tell the code that the button has been released
launcher.stop()
controller_1_left_shoulder_control_motors_stopped = True
#same but for the right side bumpers
if controller_1.buttonR1.pressing():
Intake.spin(FORWARD)
controller_1_right_shoulder_control_motors_stopped = False
elif controller_1.buttonR2.pressing():
Intake.spin(REVERSE)
controller_1_right_shoulder_control_motors_stopped = False
elif not controller_1_right_shoulder_control_motors_stopped:
Intake.stop()
controller_1_right_shoulder_control_motors_stopped =True
wait(20, MSEC)
#define variable for remote controller enable/disable
remote_control_code_enabaled =True
rc_auto_loop_thread_controller_1 = Thread(rc_auto_loop_function_controller_1)
from vex import *
#Blue Ratio is 6:1
#Green Raio is 18:1
#REd Ratio is 36:1
def pre_autonomous():
global myVariable
Intake.set_velocity(200, RPM)
launcher.set_velocity(350, RPM)
setter.set_velocity(600, RPM)
expansion.set_velocity(100, PERCENT)
def autonomous():
brain.screen.clear_screen()
brain.screen.print("Autonomous is running currently")
global myVariable
#Write the autonomous code here
def user_control():
brain.screen.clear_screen()
#Driver control goes here
brain.screen.print("Drive control is running currnetly")
#Code for the setter to go
def controller_buttonX_pressed():
global myVariable
expansion.spin_for(FORWARD, 100, DEGREES, wait=True)
controller_1.buttonX.pressed(controller_buttonX_pressed)
wait(15, MSEC)
def controller_buttonUp_pressed():
global myVariable
setter.set_velocity(95, PERCENT)
setter.spin_for(FORWARD, 360, DEGREES, wait=True)
controller_1.buttonUp.pressed(controller_buttonUp_pressed)
wait(15, MSEC)
#If we hit the wrong button this should undo it
def controller_buttonB_pressed():
global myVarible
launcher.spin_for(REVERSE, 100, DEGREES, wait=False)
expansion.spin_for(REVERSE, 100, DEGREES, wait=True)
controller_1.buttonB.pressed(controller_buttonB_pressed)
wait(15, MSEC)
#Creates the competition format code
comp = Competition(user_control, autonomous)
pre_autonomous()
The code you posted throws an exception (ie. there’s an error in the code that causes an error on the brain screen).
These two lines are incorrect.
launcher_pt1 = Motor(Ports.PORT15, GearSetting, GearSetting.RATIO_6_1, True)
launcher_pt2 = Motor(Ports.PORT13, GearSetting, GearSetting.RATIO_6_1, False)
They have an extra parameter for some reason.
should be
launcher_pt1 = Motor(Ports.PORT15, GearSetting.RATIO_6_1, True)
launcher_pt2 = Motor(Ports.PORT13, GearSetting.RATIO_6_1, False)
other than that, the code seems to work (at least superficially)
Ok, this is my current code:
#region VEXcode Generated Robot Configuration
from vex import *
import urandom
# Brain should be defined by default
brain=Brain()
# Robot configuration code
controller_1 = Controller(PRIMARY)
left_drive_smart = Motor(Ports.PORT17, GearSetting.RATIO_18_1, False)
right_drive_smart = Motor(Ports.PORT20, GearSetting.RATIO_18_1, True)
drivetrain = DriveTrain(left_drive_smart, right_drive_smart, 319.19, 295, 40, MM, 1)
Intake_motor_a = Motor(Ports.PORT12, GearSetting.RATIO_18_1, True)
Intake_motor_b = Motor(Ports.PORT18, GearSetting.RATIO_18_1, False)
Intake = MotorGroup(Intake_motor_a, Intake_motor_b)
setter = Motor(Ports.PORT19, GearSetting.RATIO_18_1, False)
# vex-vision-config:begin
vision_11__BLUE_GOAL = Signature(1, -2809, -2105, -2457,5189, 6839, 6014,4.3, 0)
vision_11 = Vision(Ports.PORT11, 50, vision_11__BLUE_GOAL)
# vex-vision-config:end
launcher_motor_a = Motor(Ports.PORT15, GearSetting.RATIO_18_1, True)
launcher_motor_b = Motor(Ports.PORT13, GearSetting.RATIO_18_1, False)
launcher = MotorGroup(launcher_motor_a, launcher_motor_b)
expansion = Motor(Ports.PORT14, GearSetting.RATIO_18_1, False)
randombsthingforetha = Motor(Ports.PORT16, GearSetting.RATIO_18_1, False)
# wait for rotation sensor to fully initialize
wait(30, MSEC)
#endregion VEXcode Generated Robot Configuration
# ---------------------------------------------------------------------------- #
# #
# Module: main.py #
# Author: tcsha #
# Created: 2/13/2023, 10:18:56 PM #
# Description: V5 project #
# #
# ---------------------------------------------------------------------------- #
# Library imports
from vex import *
# Brain should be defined by default
brain = Brain()
# Config the robot
wait(30, MSEC)
controller_1_left_shoulder_control_motors_stopped = True
controller_1_right_shoulder_control_motors_stopped = True
controller_1_up_down_buttons_control_motors_stopped = True
drivetrain_needs_to_be_stopped_controller_1 = False
# Controller input define for tasks
def when_started1():
global myVariable,
def rc_auto_loop_function_controller_1():
global drivetrain_needs_to_be_stopped_controller_1, controller_1_left_shoulder_control_motors_stopped, controller_1_right_shoulder_control_motors_stopped, controller_1_up_down_buttons_control_motors_stopped, remote_control_code_enabaled
while True:
if remote_control_code_enabaled:
#calculate the drivetrain motor velocities from the controller joystick axies
#left = axis3 + axis4
#right =axis3 +axis4
drivetrain_left_side_speed = controller_1.axis3.position() + controller_1.axis4.position()
drivetrain_right_side_speed = controller_1.axis3.position() - controller_1.axis4.position()
#check if the values are inside of the deadband range
if abs(drivetrain_left_side_speed) < 5 and abs(drivetrain_right_side_speed) < 5:
if drivetrain_needs_to_be_stopped_controller_1:
#stop the drive stuff
left_drive_smart.stop()
right_drive_smart.stop()
#tell the code the motors have been stopped
drivetrain_needs_to_be_stopped_controller_1 = False
else:
#rest the toggle so that the deadband code knows to stop the motors next time the input is in the deadband range
drivetrain_needs_to_be_stopped_controller_1 = True
#only tell the left drive motor to spin if the values are not in the deadband range
if drivetrain_needs_to_be_stopped_controller_1:
left_drive_smart.set_velocity(drivetrain_left_side_speed, PERCENT)
left_drive_smart.spin(FORWARD)
#same thing but for the right side drive
if drivetrain_needs_to_be_stopped_controller_1:
right_drive_smart.set_velocity(drivetrain_right_side_speed, PERCENT)
right_drive_smart.spin(FORWARD)
#check the L1/L2 buttons
if controller_1.buttonL1.pressing():
launcher.spin(FORWARD)
controller_1_left_shoulder_control_motors_stopped = False
elif controller_1.buttonL2.pressing():
launcher.spin(REVERSE)
controller_1_left_shoulder_control_motors_stopped = False
elif not controller_1_left_shoulder_control_motors_stopped:
#sets a toggle so we don't have to constantly tell the code that the button has been released
launcher.stop()
controller_1_left_shoulder_control_motors_stopped = True
#same but for the right side bumpers
if controller_1.buttonR1.pressing():
Intake.spin(FORWARD)
controller_1_right_shoulder_control_motors_stopped = False
elif controller_1.buttonR2.pressing():
Intake.spin(REVERSE)
controller_1_right_shoulder_control_motors_stopped = False
elif not controller_1_right_shoulder_control_motors_stopped:
Intake.stop()
controller_1_right_shoulder_control_motors_stopped =True
wait(20, MSEC)
#define variable for remote controller enable/disable
remote_control_code_enabaled =True
rc_auto_loop_thread_controller_1 = Thread(rc_auto_loop_function_controller_1)
from vex import *
#Blue Ratio is 6:1
#Green Raio is 18:1
#REd Ratio is 36:1
def pre_autonomous():
global myVariable
Intake.set_velocity(200, RPM)
launcher.set_velocity(350, RPM)
setter.set_velocity(600, RPM)
expansion.set_velocity(100, PERCENT)
def autonomous():
brain.screen.clear_screen()
brain.screen.print("Autonomous is running currently")
global myVariable
#Write the autonomous code here
def user_control():
brain.screen.clear_screen()
#Driver control goes here
brain.screen.print("Drive control is running currnetly")
#Code for the setter to go
def controller_buttonX_pressed():
global myVariable
expansion.spin_for(FORWARD, 100, DEGREES, wait=True)
controller_1.buttonX.pressed(controller_buttonX_pressed)
wait(15, MSEC)
def controller_buttonUp_pressed():
global myVariable
setter.set_velocity(95, PERCENT)
setter.spin_for(FORWARD, 360, DEGREES, wait=True)
controller_1.buttonUp.pressed(controller_buttonUp_pressed)
wait(15, MSEC)
#If we expand early this undoes it
def controller_buttonB_pressed():
global myVarible
launcher.spin_for(REVERSE, 100, DEGREES, wait=False)
expansion.spin_for(REVERSE, 100, DEGREES, wait=True)
controller_1.buttonB.pressed(controller_buttonB_pressed)
wait(15, MSEC)
#Creates the competition format code
comp = Competition(user_control, autonomous)
pre_autonomous()
and It’s still not working, I’m not sure if has something to do with a fire wall at my school but I don’t think it does.