Here is a link to pictures of some of the models. https://photos.app.goo.gl/cHH8IZbqnWlTMaa53 Keep in mind that a model is worth a thousand pictures. Here is a video that my younger son and I made a few years ago. It explains the basic lift types:
These models are hard to keep together. I did make a stronger scissor lift, but it was way too much fun; put a puncher on the end and you could whack someone with it from 5 feet away. I had to take it apart and forgot to get pictures.
Some other interesting lifts…
Cross linked DR4B. This one is hard to explain. We got the idea from our FRC team. Here is a picture of their robot that used it.
The advantage of this lift is that it can be very lightweight, fast, and most importantly it has a low center of gravity even when fully extended. The tradeoff is that it doesn’t go precisely straight up, there is a little bit of a sway to it.
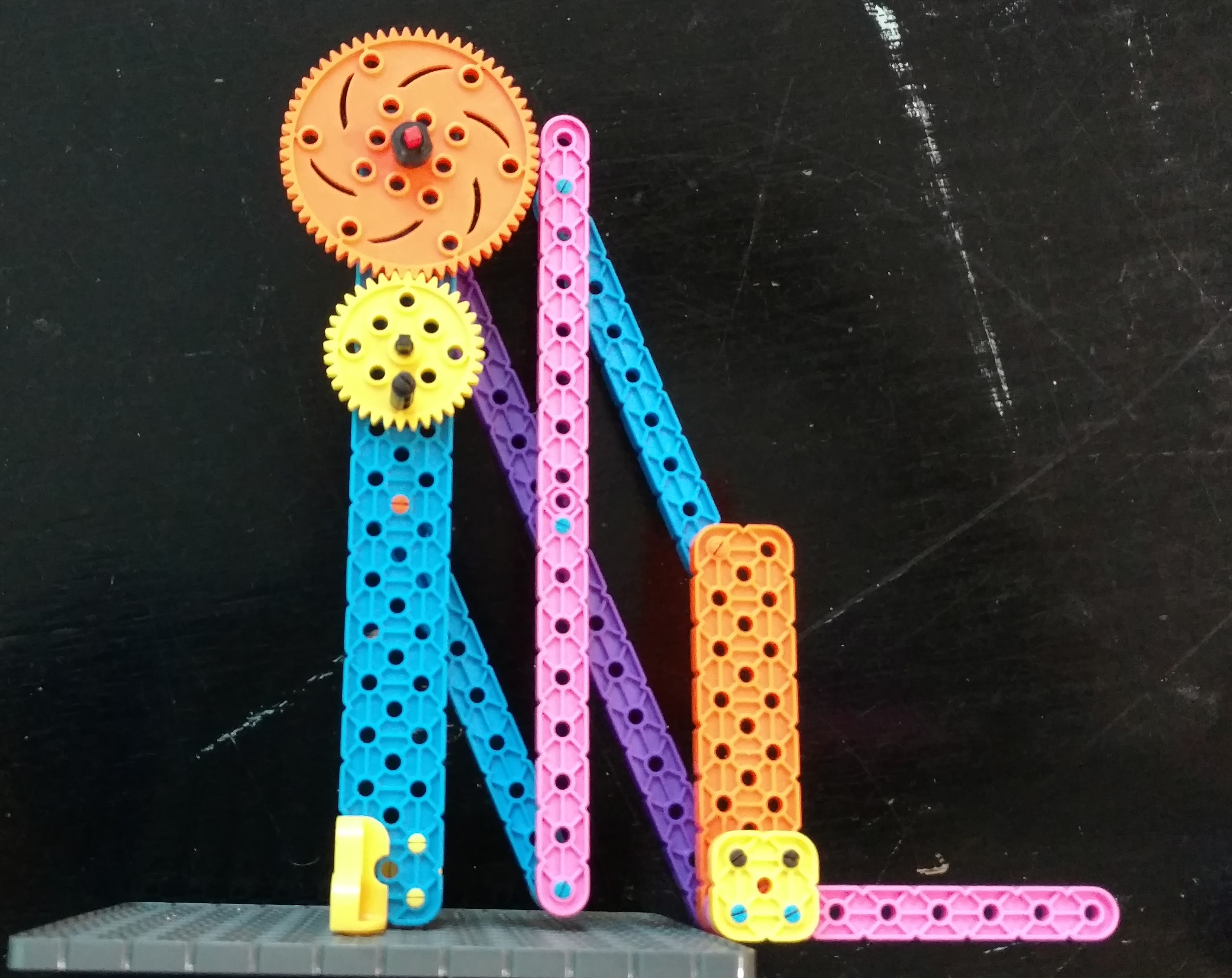
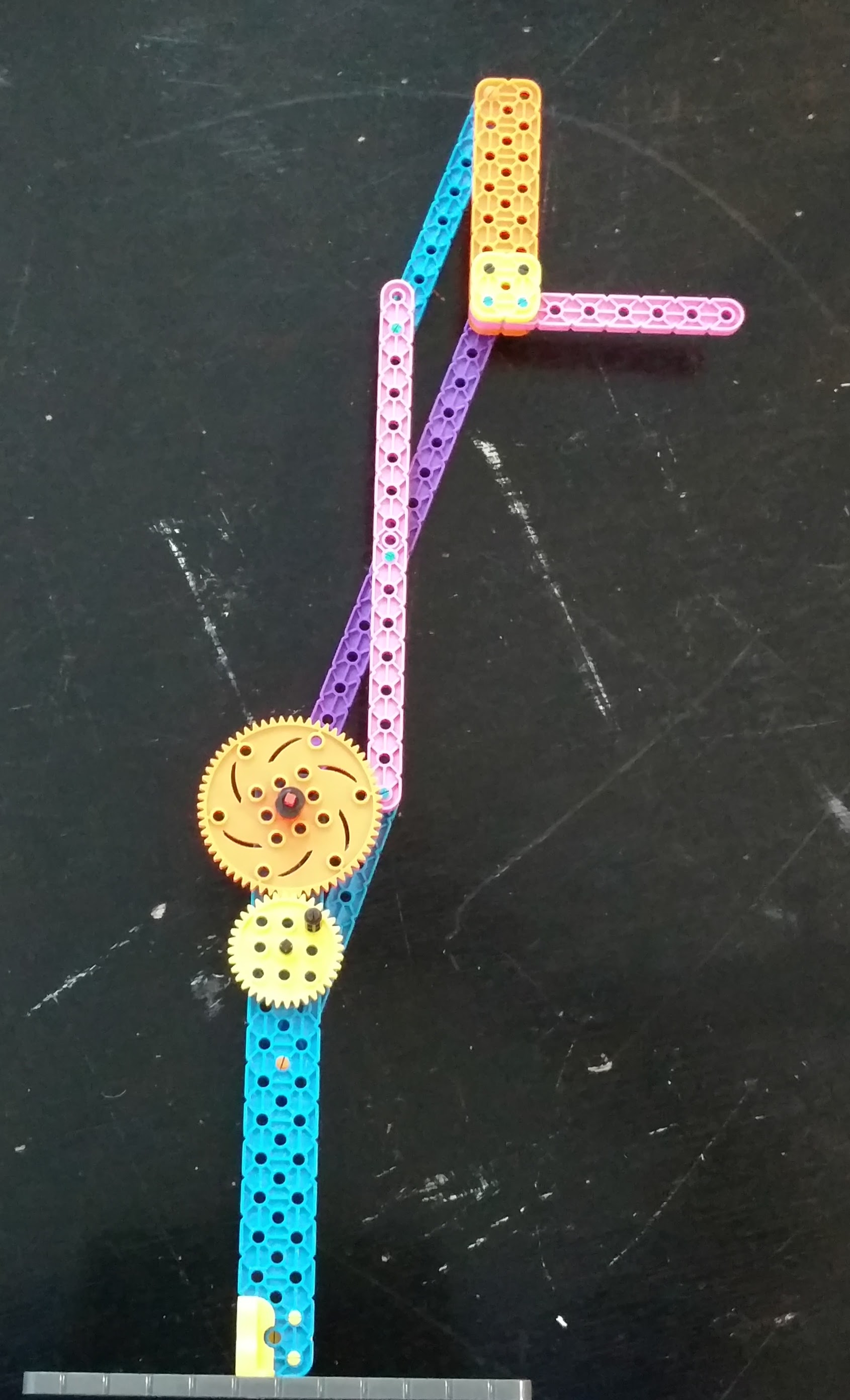
Non-symmetrical 6 bar. In robotics we usually try to make our 4 bar and 6 bar linkages symmetrical. And it is important that new teams start out this way. But if you were to look up “six bar linkage” in Wikipedia those mechanisms don’t look anything like what we are used to. The beams can be all different lengths and attached at odd points. Here is an example of you what can do with a 6 bar just by changing the geometry slightly.
Normal 6 Bar:
Non-symmetrical 6 bar:
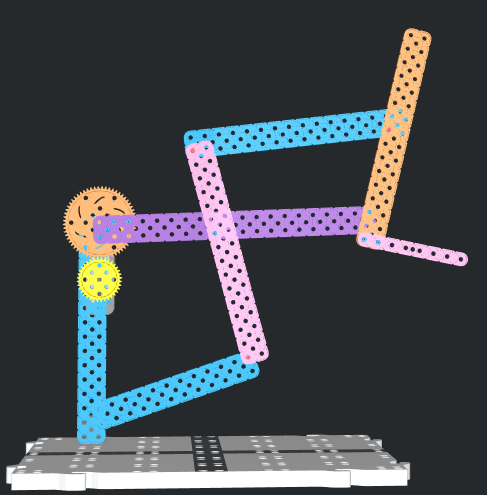
You might be asking yourself why you would want something like this. Click here to open a sample model made in RobotMesh Studio as a mimic.
I haven’t tried sharing anything like this before, so please let me know if it doesn’t work. When you first open the project your screen should look like this:
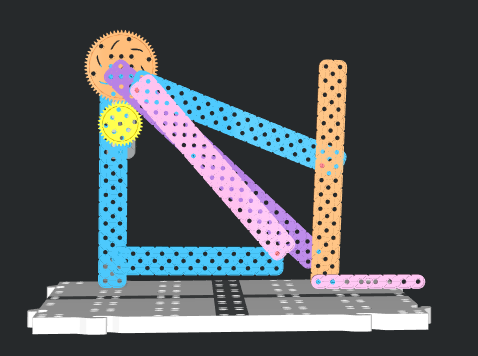
Click on the Mimic tab to see the 3D model:
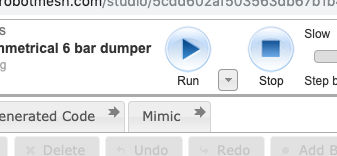
Then press the Run button:

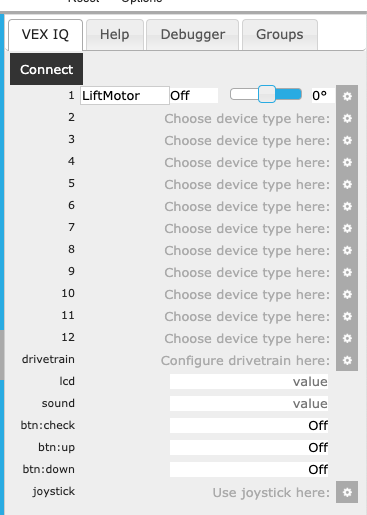
On the right of the screen you should see a list of devices that is mostly empty:
Note that gravity will pull the lift down to the starting position. Now use the slider control to the right of the “Lift Motor” to control the motor speed in the model:

Move the slider to the left slightly to set the motor speed to Reverse 20:

The block should slide off the front of the model when the lift is almost fully extended.
So a lift like this might be useful for a forward facing high dump truck. This is just one example, moving the placement of the connector pins or changing the lengths of any of the beams changes the whole motion. Endless possibilities.