How would one build a lift transmission that starts from a 5:1 and ends up with a 15:1 using pneumatics?
What you seem to describe is a shifter. It’s the same for a drive as it is for an arm. It usually involves engaging and disengaging a gear. Usually with a between step that is sort of neutral, or not engaged to either gear.
In this case you use the pneumatic cylinder to push or pull a shaft that transfers power to and from the two different output gears.
Here’s a decent picture of a motorized one:
http://www.chiefdelphi.com/media/img/fe3/fe3a94c2dd44f27865ad476da63cfb7e_l.jpg
-Cody
looks great. Is that shifted with a servo?
Could be either, or pneumatics, pretty much anything that can create the linear motion needed to move the shaft.
-Cody
I remember looking at a few other systems, they had a gear which ensured that every axle spins at the same rate while shifting. Though i’ve never worked with a shifter and down know it’s significance, i heard that adding those gears will make shifting smoother and much easier on the gears
I believe that is called a Synchromesh. Two conical plates contact to synchronize in speed prior to locking, resulting in a smooth transition. It allows for gear shifting whilst the axles are still moving (sliding mesh transitions, as pictured about, perform poorly during powered transitions.
As for implementation in VEX, we’ve discussed some designs using the college custom plastic block (or 3D printed parts this season), as this sort of part is fairly specific and would be difficult to build using just VEX parts alone. However, this does not mean that it is impossible. Polycarbonate could be used to provide an initial contact, with some sort of “Dog Tooth” locking system after to ensure no slip can occur after the gear is engaged.
~Matt
A Dog shift in VEX is really quite easy, you just have to be creative. The main problem you will face is keeping shifting gears in place, considering you know how to do the DOG. Anyways. The biggest downside about a shifter is the fact that it takes up SO. MUCH. ROOM.
599D Robodox had a synchro gear at worlds. Had the most beautiful and quick shift mechanism I have ever seen.
Are they willing to post pictures? I am curious to see how they managed to make it stable and reliable. It may just be my experience with breaking gears, but I thought the engaging/disengaging of dogs in a transmission would be very hard on the plastic.
We actually never had a synchro gear. It was just a simple shear transmission. We found that shifting two different gears/shafts had minimal effect on the performance on the transmission. Although we never beveled the gears, we’ve never had gears skip while shifting.
Here, here, here, and here are all pretty good transmission videos. Just search youtube for VEX transmission and you’ll get good results. The Exothermic transmission (first link) is the best IMO.
My suggestion: only use a transmission if you have half of your robots volume completely free of space. Maybe half is an exaggeration but all the transmissions that I have seen take up a good amount of space. Some transmissions are very useful though.
The problem with Exothermic’s transmission though, is that one side shifts before the other, meaning your robot will curve slightly while shifting. The other transmissions have both sides synchronized to make sure they shift at the same time.
Here’s a picture of our transmission if anyone is interested:

Great. Thanks for the pic.
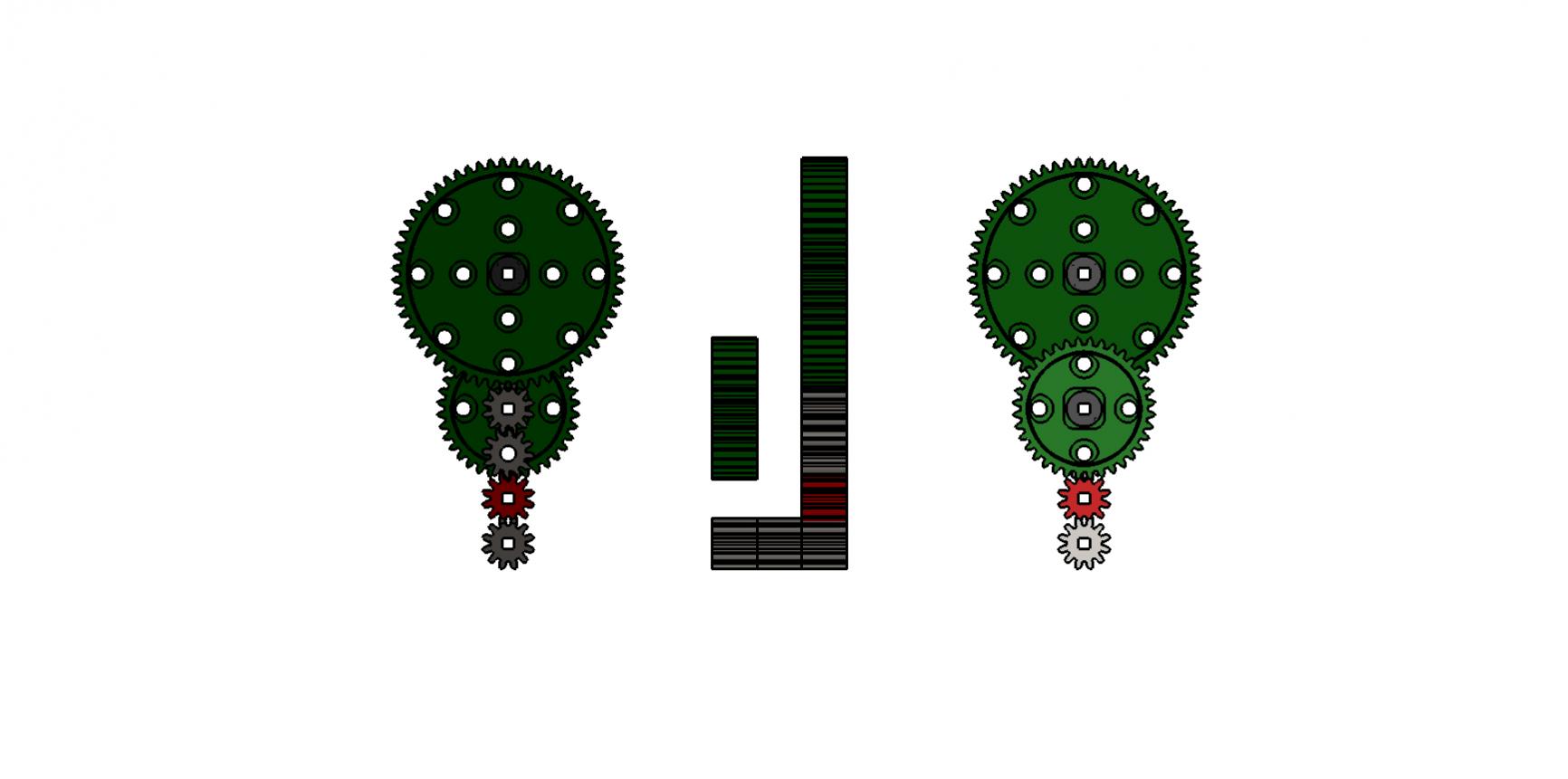
The metal to support the gears get in the way of the shifting gear by the way.
The center of the gear you are referring has to be drilled out and then a screw is fastened to the supporting metal and used as a shaft. In doing this it no longer needs support between the 12 and 36 tooth gears. Then on this screw-shaft I would recommend the following: a Teflon washer, the 12 tooth gear, another Teflon washer, and a nylon lock nut to act as a collar.
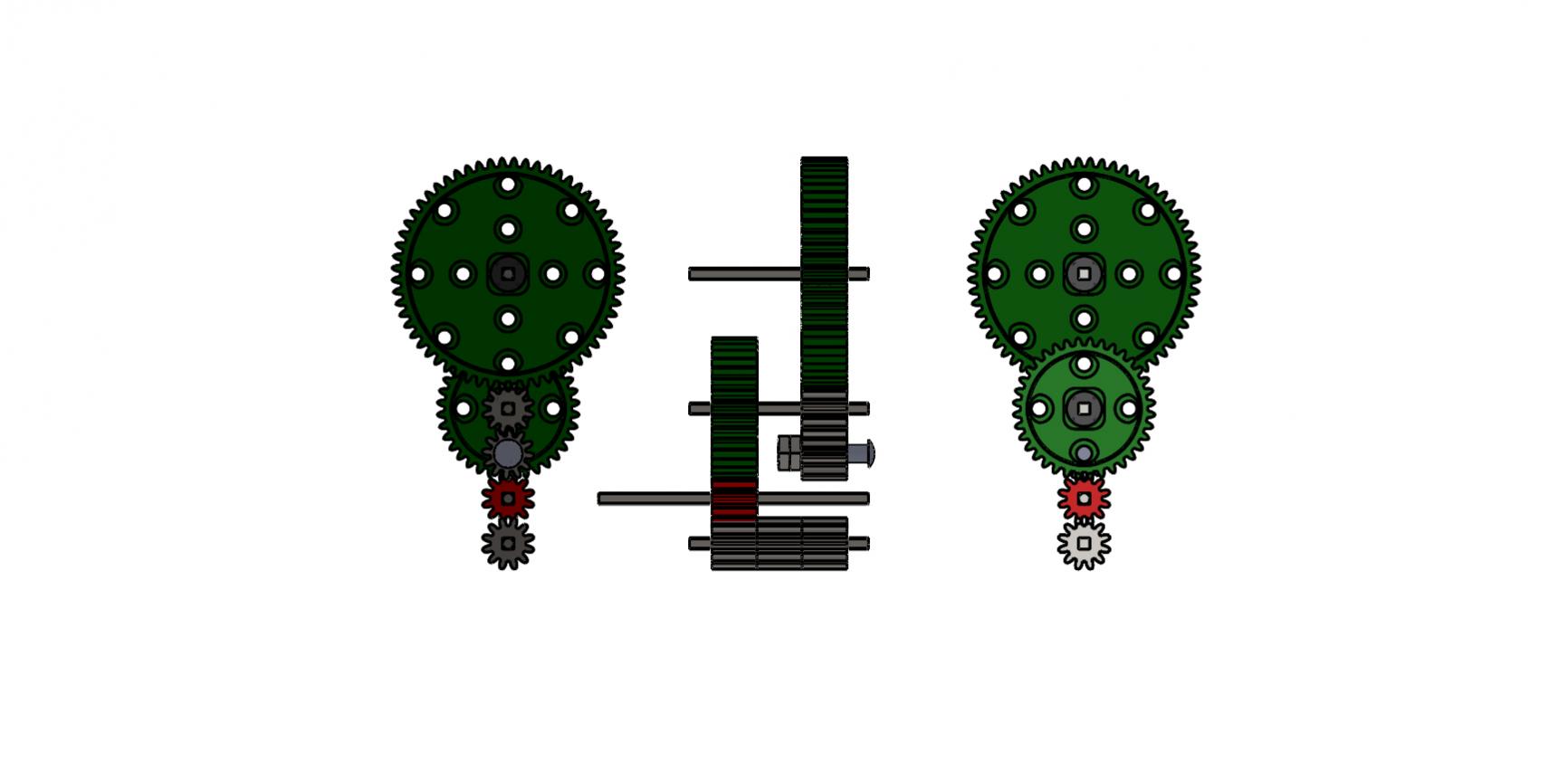
Shafts (and screw) have been included in the model below.
How well aligned do the gears stay? Does it shift smoothly, or are the gears ever misaligned to the point where it catches on itself while shifting?
I did not make this exact transmission, but I have a variation of it on my robot now and I have been very pleased with it. It can ‘catch on itself while shifting’ on occasion. When this happens a slight turn of the shaft fixes the problem and the transmission will become uncaught.
If ‘catching on itself’ becomes a problem a potentiometer or two limit switches can be used to track the position of the shifting mechanism as it shifts and correct the catching as it happens.
As far as gear alignment goes it’s just the same as any other gearbox made from VEX parts. Drilling out the 12 tooth gear is essentially the same as putting plastic inserts into a 36 or 60 tooth high strength gear.