If Nothing-But-Net was all about speed, there is a good chance the next year’s game will need torque and precision driving. Even if it won’t, transmissions are cool, and you could easily imagine gameplay that would benefit from drivetrain that starts with high torque and then could shift into the high speed mode while still under load.
First of all, let me say that shifting non-synchronous transmissions are the most efficient way to transfer power. They work by altering power path through the gear train by engaging or disengaging some of the gears.

However, operating such transmission, especially while under load, requires sophisticated driver skills, an advanced electronic control, or both. Otherwise you are risking jamming or damaging transmission gears (here is a high profile example).
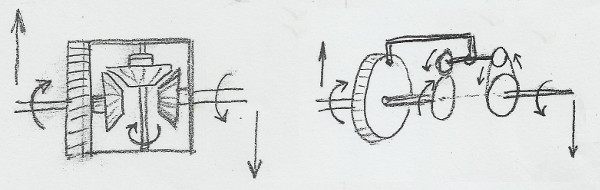
Alternative to non-synchronous transmission is a synchronized transmission that employs a set of differentials where you lockdown certain gears to shape the final power path. With synchronized transmissions you still need to catch a lock, but those locking surfaces are separate from the gear teeth that continuously transfer power and protects latter from the accidental damage during shifting.
If you are building any shifting transmission using VEX parts you will need either pneumatics or a dedicated motor (servo) for shifting, as well as good control code and some experience to make it all work right. (Green Egg Transmission, 2R Shifting Transmission, Team 62 Skyrise, Gael Force NbN, … )
Transmissions had been covered here before, on multiple occasions, and some teams have even used them in their final competition designs:
84-Tooth Planetary Transmission - UNOFFICIAL Tech Support - VEX Forum (2R’s planetary)
A transmission like system without pneumatics or motors - General Forum - VEX Forum
Chassis: Speed vs Torque - VEX V5 Technical Support - VEX Forum
Unlike the real world transmissions, where power usually comes from a single source, typical VEX application will have multiple motors providing power and many designs involve multiple differentials combining that power.
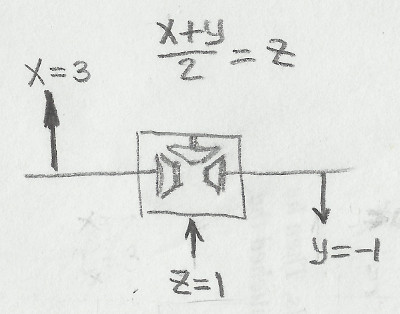
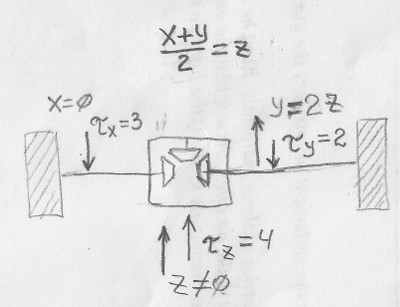
There are several gotchas doing that. First of all, limited set of VEX parts presents some challenges. And, second, when using differentials you need to be aware of the torques acting on all of the input sides. If one of the sides has a lot of torque - any extra torque will be left unused, while increased output resistance could be backdriving the other input (with a lower torque). I will try to give some examples of that later.
It is very easy to end up with a situation very well described by this quote:
However, in certain configurations, differential based transmission could work very efficiently and without much of the power losses. The natural choice for nonshifting transmission utilizing multiple motors is combination of differentials and ratcheting, which I was happy to see in some of the designs linked above.
The trick is to do it with minimal number of parts and matched torques so that you get the best usage of your motors and total available power.
Exercise 1
For starters, here is a simple exercise. Assume you have three motors that we are going to run in some reasonable mode, like 75% velocity / 25% torque load (to prevent PTC from triggering).
If you have built a direct drive you would get 3x torque at 1x speed (compared to a single motor output).
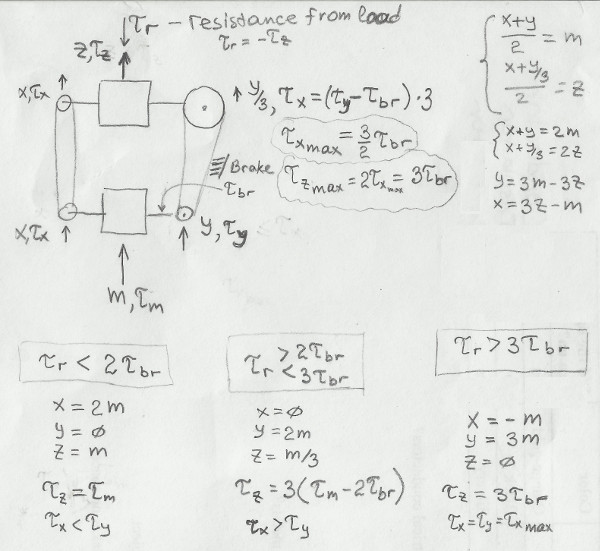
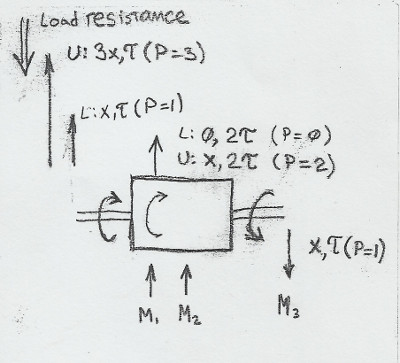
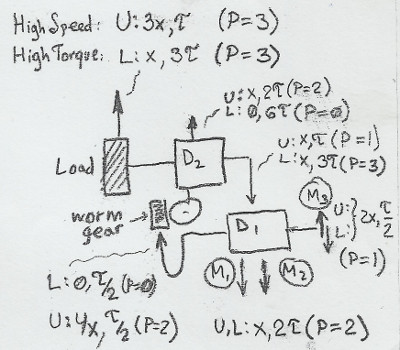
Now try to design a system that uses some sort of a ratchet and a differential that could provide:
3x torque at 1x speed in high torque mode (when ratchet is engaged) and
1x torque at 3x speed in high speed mode otherwise (when ratchet is slipping)
(don’t worry about almost non-existent reverse mode - it will be topic of a later exercise)
In both modes you should have available full mechanical power of your motors minus any friction losses in the system.
Please, post your questions and answers.
Once we get the first design figured out, the following examples will go into details on how you could get both forward and reverse modes, why you could get less than optimal power out of your motors if nominal velocity or torques are not matched inside differentials, and what you can do to avoid it.