VEX Forum
Mecanum Drive Coding on VEXCode Blocks
VEX V5 General Discussion
General Forum
programming
muradmalik
October 29, 2020, 6:59pm
6
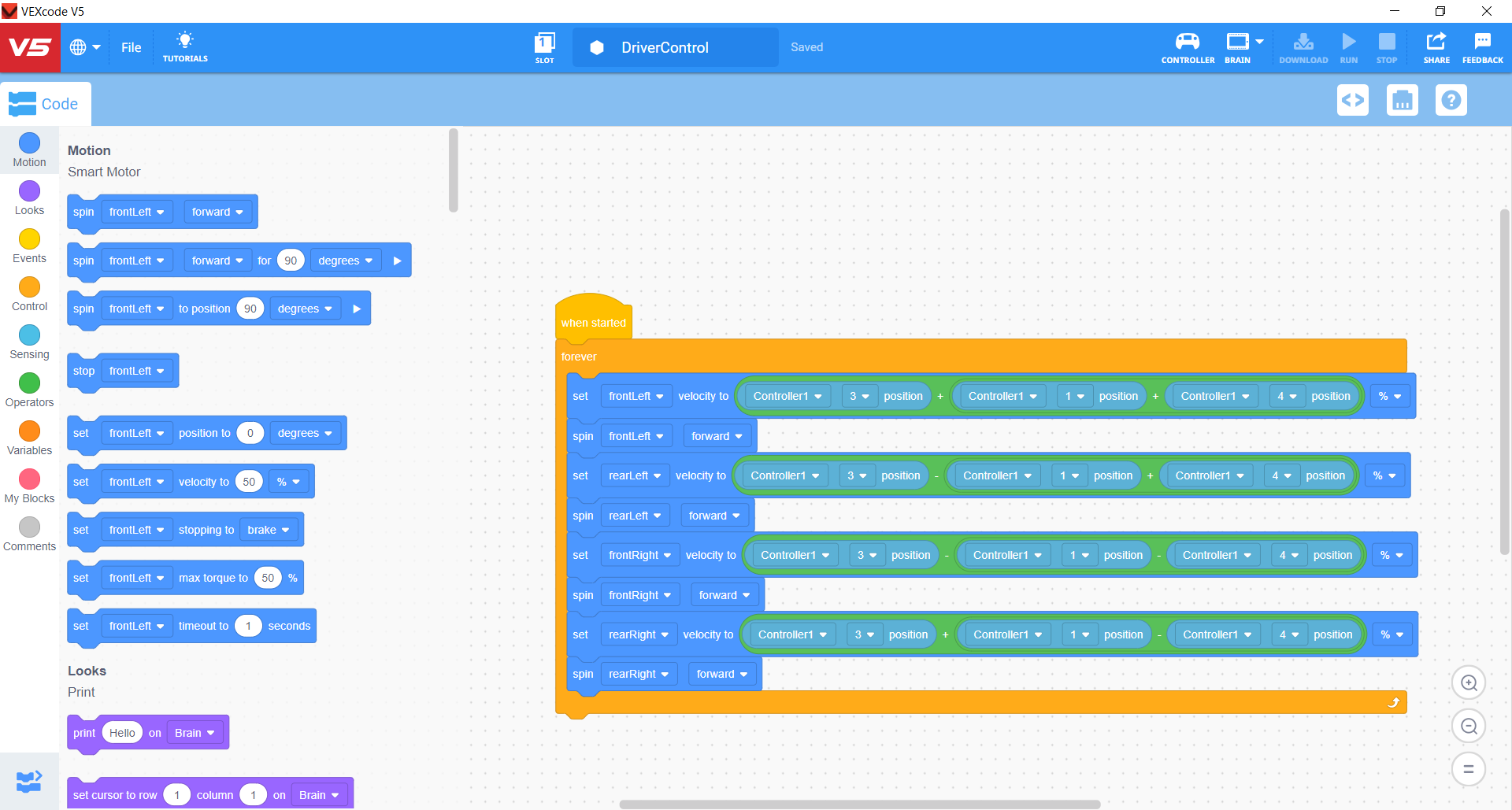
here ya go
image
1920×1029 130 KB
Mecanum Wheels V5 Block Code
show post in topic