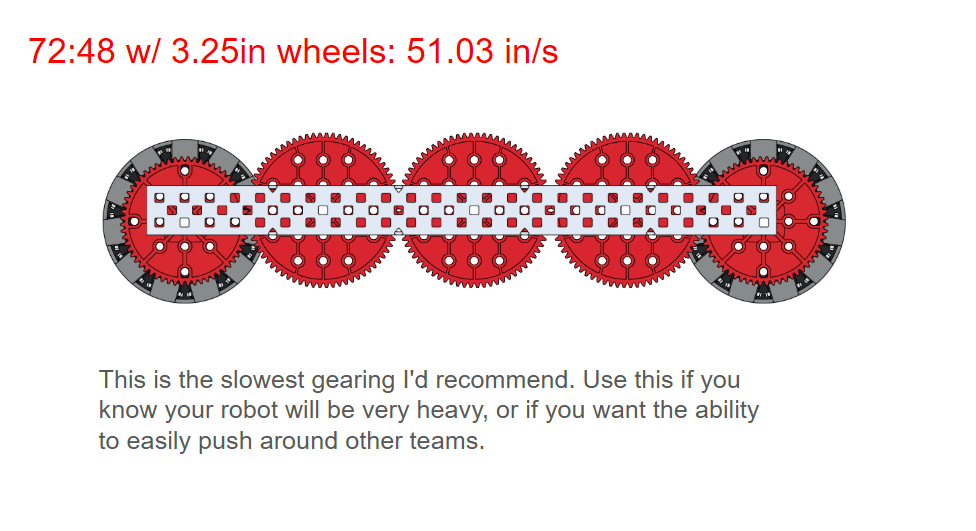
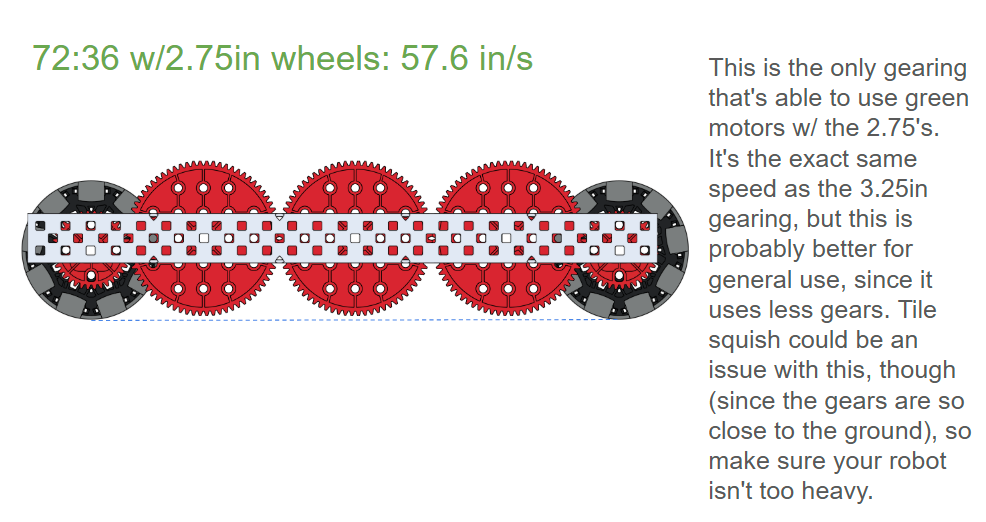
Over the past several weeks, I’ve been creating this resource for our teams to use. this is similar to the catalogue of drive gearings by Xenon27, (which several are based off of), but this provides a few different options and layouts. All use these are 6-motor drives w/ green cartridge motors, and most don’t have center traction. I also tried to avoid raised gears (with a few exceptions) since they’re more complicated to build and since the original “catalog” already has a lot of options for those. I know these won’t be as competitive as the options on the original catalog; they’re designed to be simpler and more resource-friendly (most have only 4 wheels).
(as you can see, a lot of the comments don’t really apply to people reading them here on the forum. I’m just including them since some are still useful.)
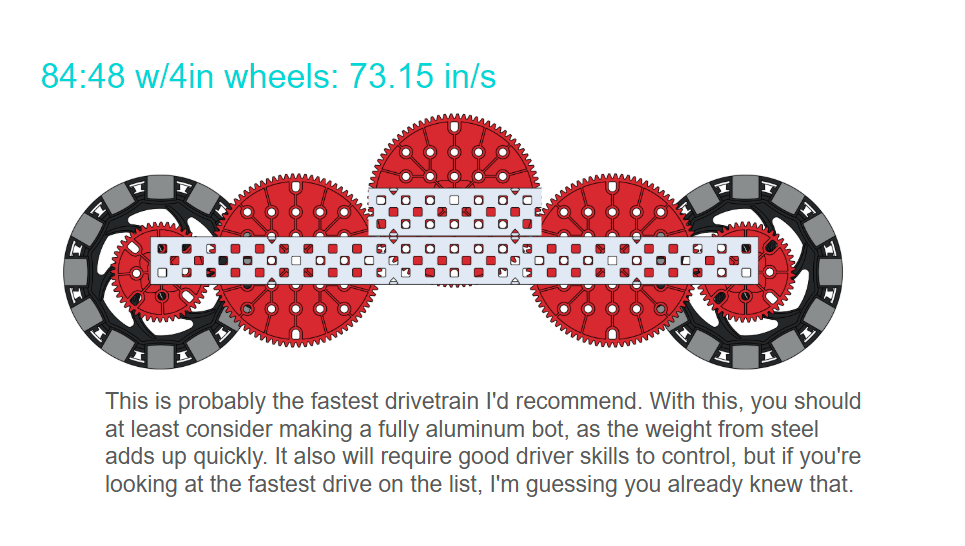
Yes, I built this abomination irl for testing. Resource limitations do be like that sometimes.
Our teams have a lot of steel parts and 4in wheels, so I’m labeling this as beginner-friendly since it uses said 4in wheels and won’t run into issues when the new teams inevitably make a 90% steel robot.
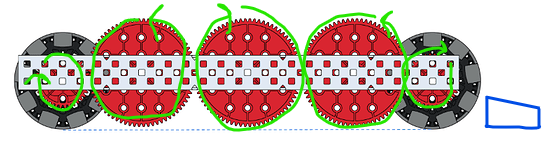
This was a finely built and tuned catalogue! The only problem I see with these gearings, is the size of the gears. For most years games, the large gears would not be a problem, but in this years game, Push Back, almost all these would not be viable. Here is an explanation.
This is a edited screenshot of the last example you gave. The green shows the rotation of the gears and the blue is an almost-to-scale drawing of the park barrier.
The first wheel would be able to cross the barrier, but when it continues going forward, the leftmost largest gear is spinning the opposite direction. Once it hits the barrier (which it will, as it is low to the ground, about 1/4 inch above), it will force the drivetrain back, as it would spin the opposite direction of the wheel, resulting in the robot not being capable of crossing the park zone. Unfortunately, this is likely the case for all your shown drive bases.
While some of these designs may work in other games in which the robot does not have to drive over solid objects (i.e. High Stakes, Spin Up, etc.), it does not in Push Back. Maybe next year 
Yeah, this is more of a general use thing, it’s not meant to be specific to this season. Although several of the gearings can be “reversed” so that the gears are slightly higher relative to the wheels. That in combination with using momentum and/or a cleverly implemented ramp could be enough to get it to work. Idk for sure though, I haven’t done any testing since I’ve graduated and am going to vexing.
Also yeah there’s literally 0 chance that the 2.75 gearing will work at all for parking
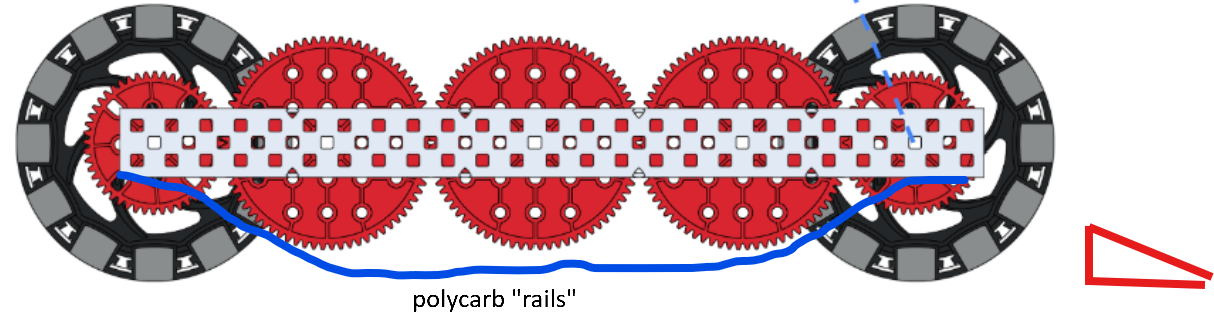
I just thought of a potential solution to this, using polycarb side plates that block the gears from hitting the ramp.
the concept in this picture would probably be out of size, but with a variation that only covers the leading gear should still work (it’s even possible it would help, since you might be able to balance on the lip of the ramp with the 2 back gears allowing a double park). the only downside I can think of is that it realistically needs 4 peices of polycarb, and some way to brace them together so they don’t just bend. our teams don’t use it that much anyways (we only had 1 piece as a sweeper mech on our robot last year), so the high polycarb cost isn’t that much of a problem, at least for us.