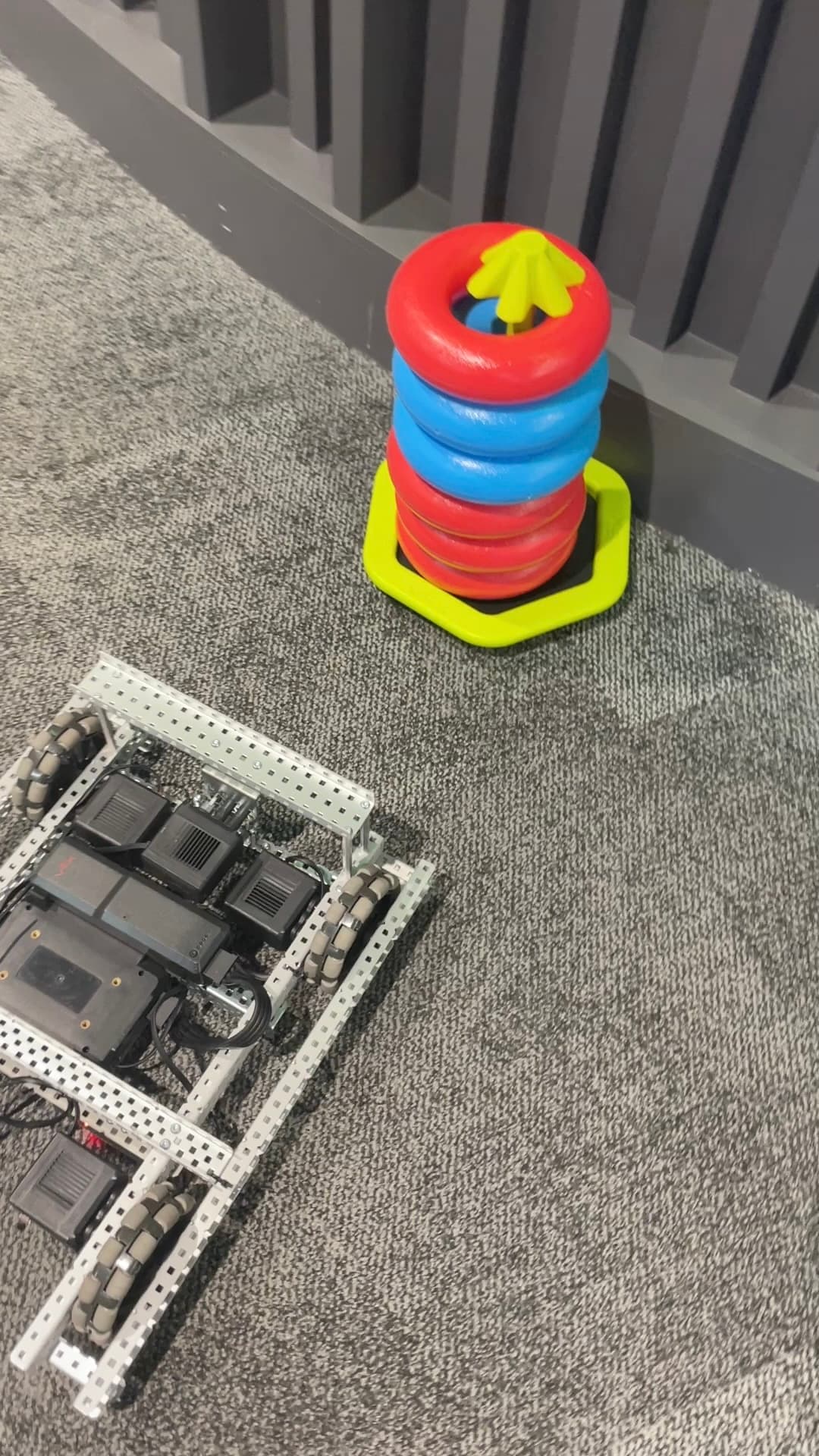
I was working on a motorized mobile goal clamp and I came up with this design
It works but it loses grip after 30 seconds of rough play any ideas on how to improve it?
My school does not provide pneumatics
I was working on a motorized mobile goal clamp and I came up with this design
It works but it loses grip after 30 seconds of rough play any ideas on how to improve it?
My school does not provide pneumatics
Put your motor braking to hold
I did that but it still gets lose
Nobody is going to be able to help much unless you show how it is mounted to your robot, what the goal is resting on, and how the goal is being held.
Sounds like it’s overheating.
Change your code to display that motor’s watts/amps to the brain. You can also display motor temp.
You will HAVE to keep clamp/claw motors to less that approx 2 watts because they are used to provide constant pressure… otherwise they overheat and lose power.
To accomplish this, reduce the torque setting for that motor. Given the gear reduction it should still provide enough clamping force.
Then, make a nice notebook entry about ALL this: problem, idea, code change, data acquisition, torque change, NEW data readings, results.
I would research “mechanical clamping devices”. There are numerous methods that use a simple movement to create a lot clamping force.
Also note that motor torque and speed have an inverse relationship. The shorter the bar (lever) and the more you gear down the speed, the more torque you will have to hold onto an item.
I don’t think motors are the way to go for clamping, but since you can’t use pneumatics, I would recommend increasing the torque to 100%.
I one hundred percent agree with you but as you stated I don’t have access to pneumatics I have been trying out other ways to clamp on to the goal, I will try your idea thanks!
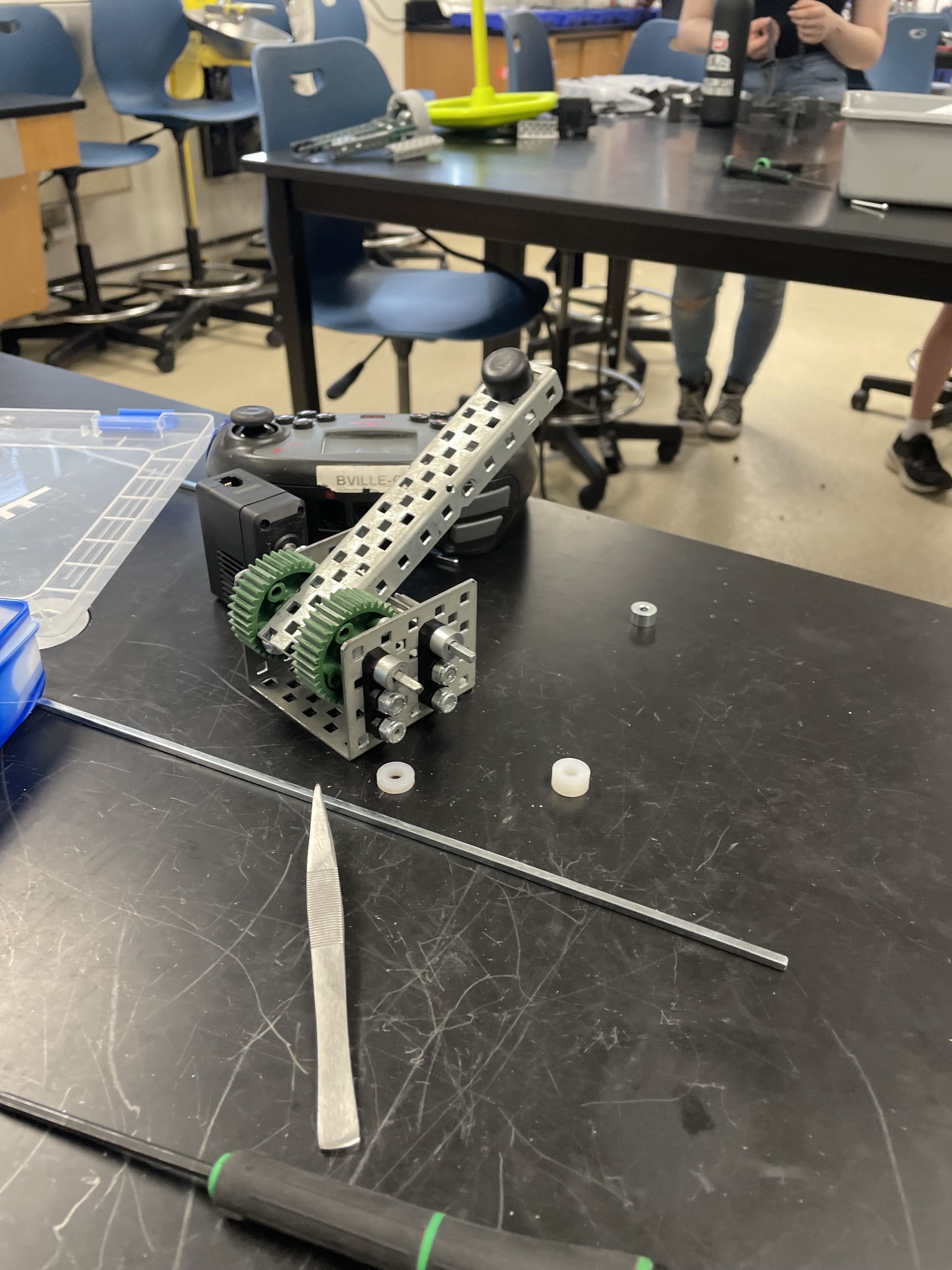
As someone from a school that does not provide pneumatics, our team was able to motorize a fairly strong clamp with a green motor, two high strength metal gears, and two 36t high strength gears screwed into a c-channel. It was able to hold on a fully scored Mobile Goal fairly well for a motor. It can easily hold a empty mobile goal/barely scored on.
Can you post pictures please? Also how often does the motor overheat?
Looking at the design All you should have to do is make the arm half as long and you will have plenty of toque. My team just Got pneumatics this year and I myself had to build one of these with out them.
If it can last a match that’s great. I would highly recommend adding some sort of bar with standoffs to line it up and make clamping more consistent.
yes we did that. after running some matches at a tournament, we found that it wasn’t consistent when other robots are constantly hitting it
why don’t you use red motors??
Try and make a ratchet system to hold the clamp down instead of relying on just the motor braking itself, which can overheat and possibly burn out the motor if used too much.
In addition to this, you can also make a locking mechanism to take some of the strain off of your motors. If i’m not mistaken, there should be some videos of locking mechanisms on YouTube.
With a ratchet mechanism it will theoretically never let it go but how would you clamp onto other mogos?
Good idea however I doing think you could implement a locking claw with gears unless you use a rack and pinion. This is since locking mechanisms need to push something over center to lock. However they may be other designs out there.
Sorry if I jump around a lot in this trying to get better at not doing that
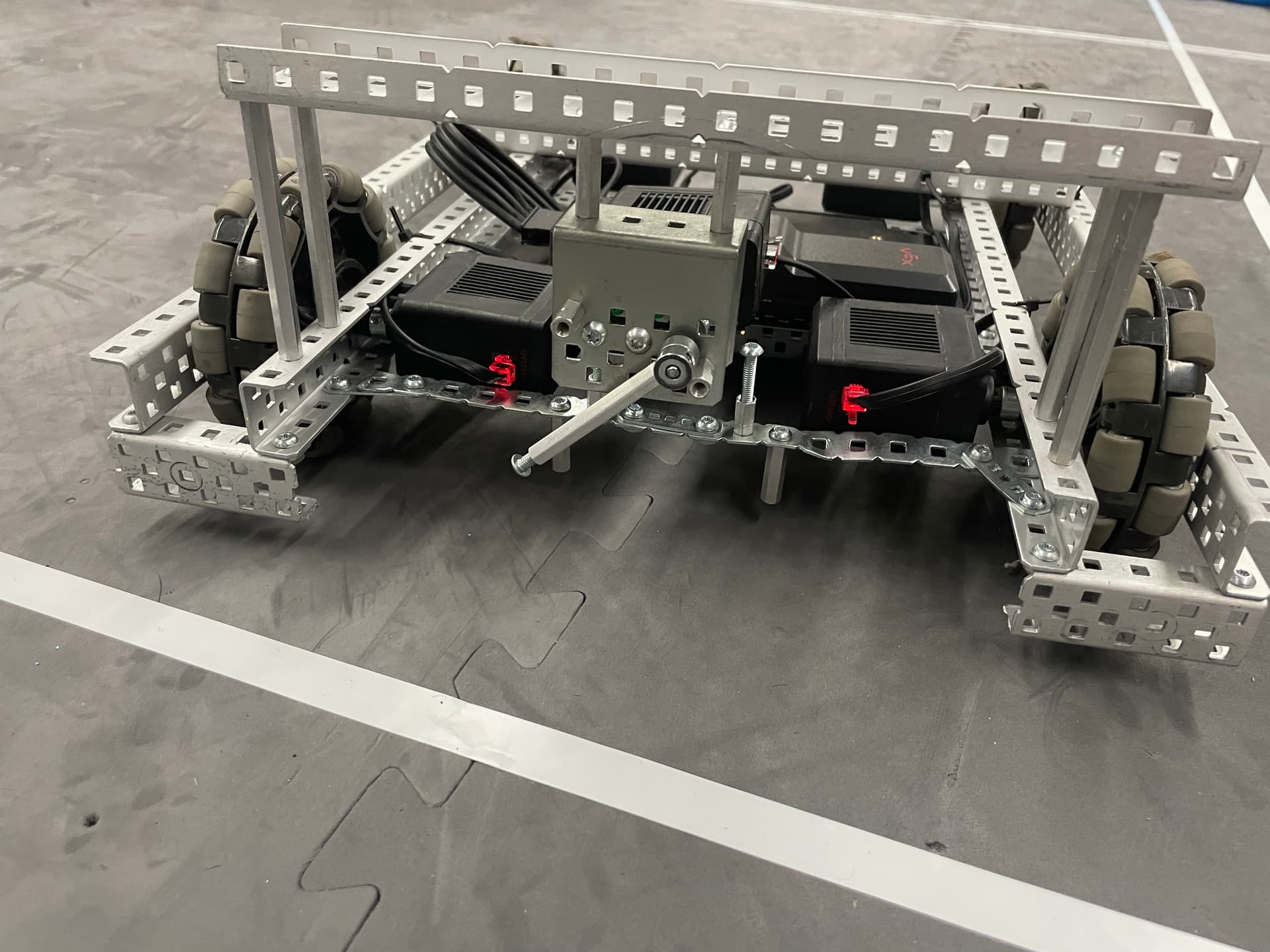
I’m pretty late on this so this might not help at all but my team has one that rotates to the side. like this
this was what our prototype looked like.
To comment about the idea of just having it set to hold for programming didn’t work for us, our programmer just ended up having the motor keep spinning to clamp but with lower force. I can’t find an updated version of our clamp but I might be able to get one on monday when I have the chance.
Trying to spin the motor when it physically can’t will overheat the motor. Setting the stopping to hold should have worked for you, especially since it doesn’t look like the mogo would be applying much force on the clamp due to its horizontal rotation.
Maybe make sure the stopping code was actually running but I would not recommend having it continuously trying to spin.