Hey everyone—hope you’re all doing well in the VEX Robotics community! I’m a newbie here, and I just started working on my VEX robot for this year’s challenge. I’m super excited but also got some questions that I hope you can help with.
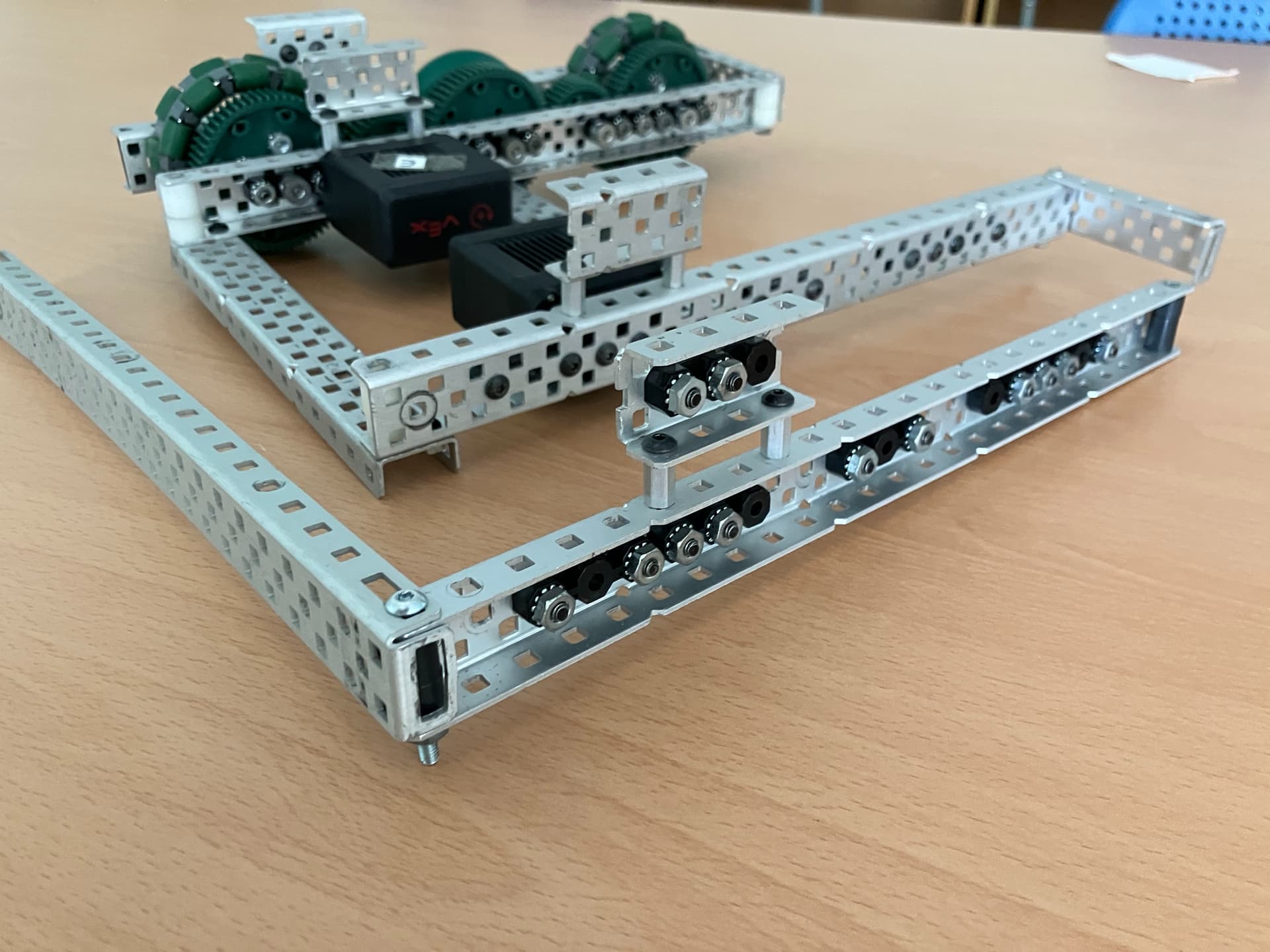
So here’s the deal—I’ve got a 4-motor drive system, each with a 600 RPM motor. The wheels I chose are 3.25 inches. I’ve made good progress so far, but here’s where the concern starts: I noticed that the barrier in the middle of the arena is slightly shorter than the wheels. My question is, do you think my robot will be able to go over the barrier?
Another thing—currently, I’m using 4 motors for the drive. Is it worth it to upgrade to 6 motors for a faster drive?
I’m really looking for advice here. Let me know what you think, and thanks in advance for the help!
I think you will be able to go over the barrier if you add sleds to the front of your bot. Your wheel placement is pretty good so I dont think you will have issues with the drive channels digging into the ground and stopping you from lifting up all the way.
As far as 4m vs 6m drive, I would honestly say it depends on what type of robot you are going for. 4m drive can work if you want to build some sort of high hanging mechanism and a shooter like team 1469A. For 6m drive, you generally want to build a bot with an intake and shooter. You can also go with an 8m drive and just play full on pushbot defense like 9364H.
If you include a sled, OR, allow one set of your wheels to be exposed, you should be fine.
HOWEVER, your drivetrain is undoubtedly too fast. We tried this exact gear ratio with a 55Watt (11Watts more than yours) drivetrain, but it was still too fast; our drivetrain overheated very quickly.
You should use 6M drive if your robot could still do everything else with the 22W remaining. You could definitely get over the barrier if you added sleds. I would also recommend using Nylock nuts instead of keps nuts, because that will make your drive more secure.
My answer, long story short, is that it is almost always good to have 6 motor drive. It does not mean faster, but it means more strength and gives you the opportunity to use faster gear ratios. Either type can probably get over the barrier but for other reasons, I am going with 6 motor drive.
Hmmm. The exact ratio OP is using is 360 rpm with 36:60 on blue motors. This is a standard gear ratio that many teams, including myself, have used. From my experience, this ratio doesnt seem to be uncontrollably fast, as it has a good balance between speed and torque when compared to other ratios for 3.25” wheels (e.g. 400 or 450 rpm).
I think you might have thought OP was running 600 rpm direct
Going over the barrier on that drive won’t be a problem, assuming you mount sleds on the front to ramp the robot up initially. Wheel size generally doesn’t matter that much all things considered (people have gone over on 2.75s).
What matters is the wheel’s contact against the pole as you go over. So you don’t want anything below your drivetrain that can get it stuck on the bar as you’re driving over. You want your wheels contacting the bar at all times.
As for 4m vs 6m. 6m is great. More immediate speed especially on blue carts, more pushing power, and you also don’t burn out as quickly. It really comes down to how many motors you need for other mechanisms, though.
gears: 36->60 (36->12->36->60 for the 5.5-watt motor)
cartridge: 600
wheels: 3.25
speed: 61 Inches per second
wattage: 55-watt
The reason I said that they might want to rethink their speed is because I misread the OP’s post slightly in that I thought they said they were only using 44 watts, and weren’t considering 66 watts. 44 watts, is in our experience not nearly enough for this speed (because 55 watts wasn’t enough).
I agree completely. I think you are right, our driver loved the speed of this drivetrain, and as you have said, it wasn’t too fast to handle… but…
My reasoning wasn’t necessarily referring to the “speed” (as I had carelessly used in my first post), but the torque of the drivetrain (specifically the 44-watt drivetrain).
I apologize for not using more careful language in my previous post.
To calculate the speed of a robot in inches per second based on its wheel RPM and wheel diameter, you need to determine how far the robot travels in one revolution of the wheel and then determine how many revolutions occur in one second.
For every full rotation of the wheel, the robot will travel approximately 12.566 inches.
The wheel turns about 4.2833 times in one second.
We can determine the distance traveled in inches in one second by multiplying the RPS by the circumference of the wheel.
So, with a 4-inch wheel turning at 257 RPM, the robot will move at approximately 53.8418 inches per second.
How far would a robot (with 4" wheels) go if its wheels each rotated for 1 revolution?
This first one is pretty easy, it’s just the circumference of the wheel (D*π) so…
3.141… * 4 = 12.546"
Now, add velocity:
We know that for every revolution, the robot travels about 12.546". If we also know that the robot’s maximum speed is 257RPM, then this means that every minute the robot’s wheels make a full revolution 257 times.
257 revolutions is also 3,224.322" of wheel travel (257 * 12.546"). the units of this measurement is Inches per minute. but we want inches per second, so since there are 60 seconds in a minute, we simply divide this by 60:
3,224.322" / 60 = 53.74 IPS (inches per second).
A while back, I wrote a python script to generate a text file which contained every conceivable gear ratio, motor cartridge, wheel size combination, and the inches per second of each combination.
Now, the vast majority of this file is next to useless since nobody in their right mind is going to make a robot with 2.75" wheels powered by a torque motor geared down 12->84… or, on the flip side, nobody in their right mind would make a drivetrain with 4" wheels powered by a turbo motor geared up 84->12… but still, if anyone wants it:
(The file extension is a .vex because vex forum wouldn’t let me upload a .txt. The file is just a plain text file, you can open it with notepad (or TextEdit if you are on mac)).
Now, there are other, better, resources then the one I shared. Here’s one:
I remember finding one that included a google sheets (I liked that one , but I can’t find it)