This isnt a vex robot, but i wondered if anyone could advise on how to reduce the way the arm is sagging at the joint, this is a 3d printed part that is screwed into a servo, i tightened it and made sure when i designed the partnit was flush but the weight of the arm seems to be pulling it away. Any ideas?
Other than the obvious of increasing torque or making the arm lighter, you could probably introduce some sort of spring boosting system, like a spring from below to boost it up, or a torsional spring at the hinging point.
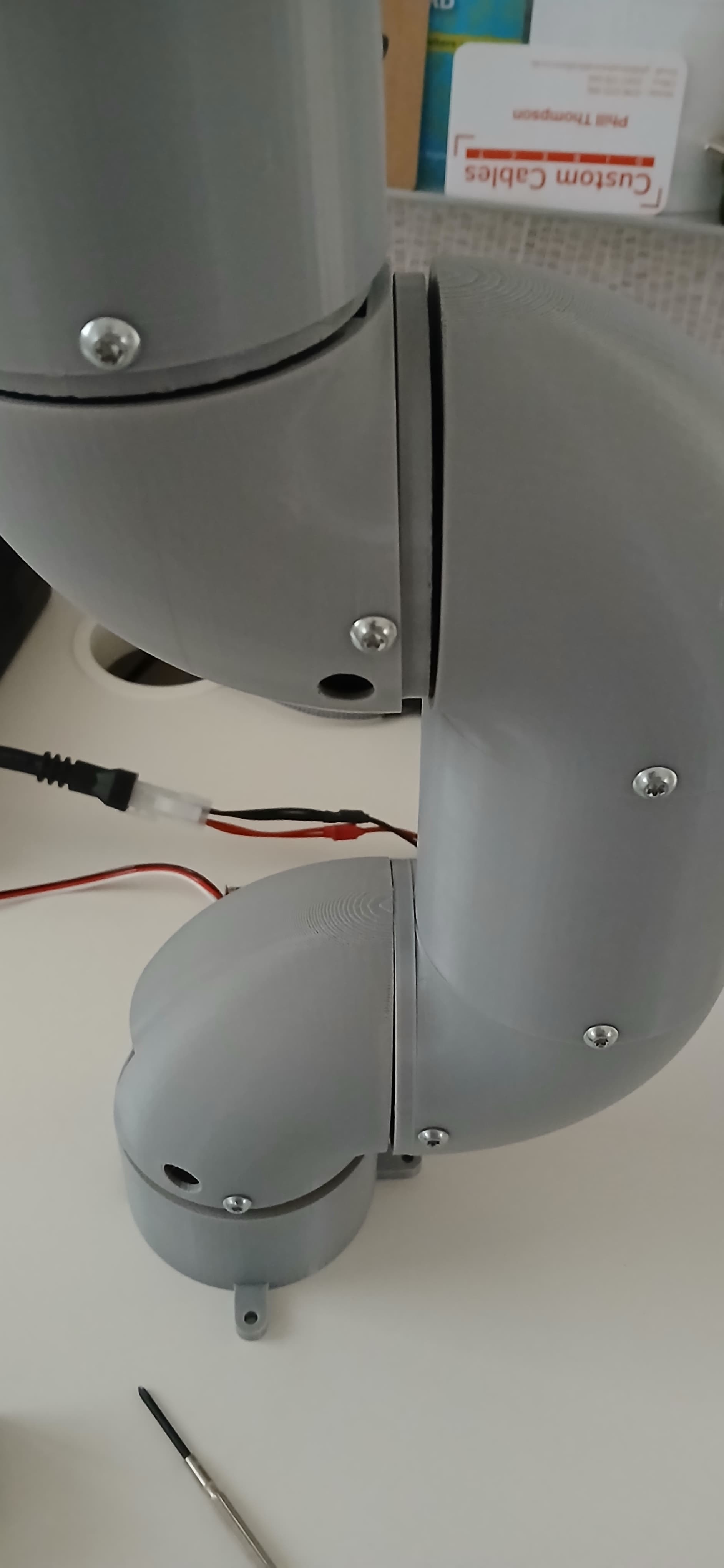
I have sent another message with an image, but the problem isnt the servo sagging, but with the material coming away from the servo, qs you can see in the gap in the image.
Adding on to this, you can use rubber bands to take some load off the motor, or add another servo on the other side of the motor and reverse its direction so the servos can work in tandem.
I see what you mean if the problem was the servo not being strong enough, but this is more to do with the material sagging, i have tightened it and it should be flat against the connecting part, but the weight causes it to pull away. Im not sure what to do, stronger material? Some kind of bearing?
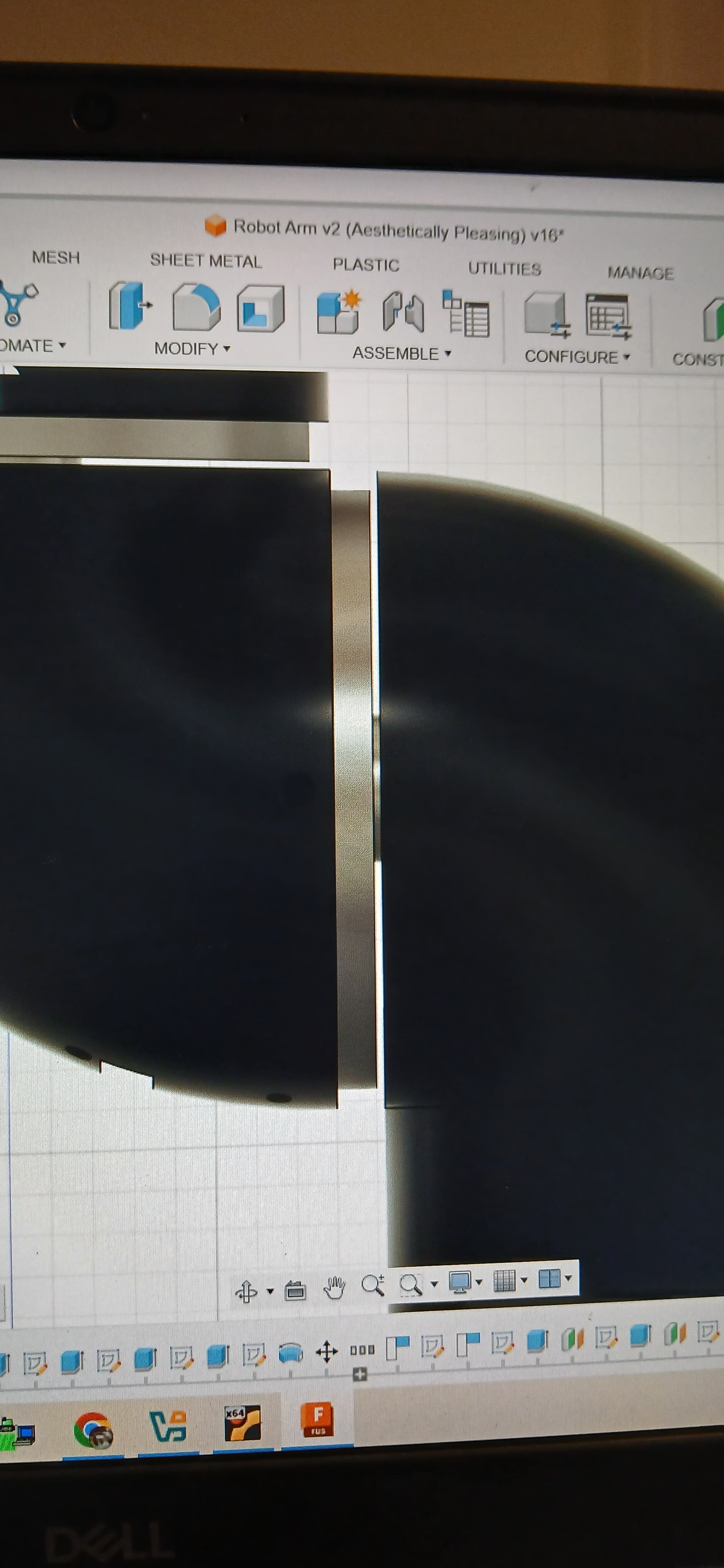
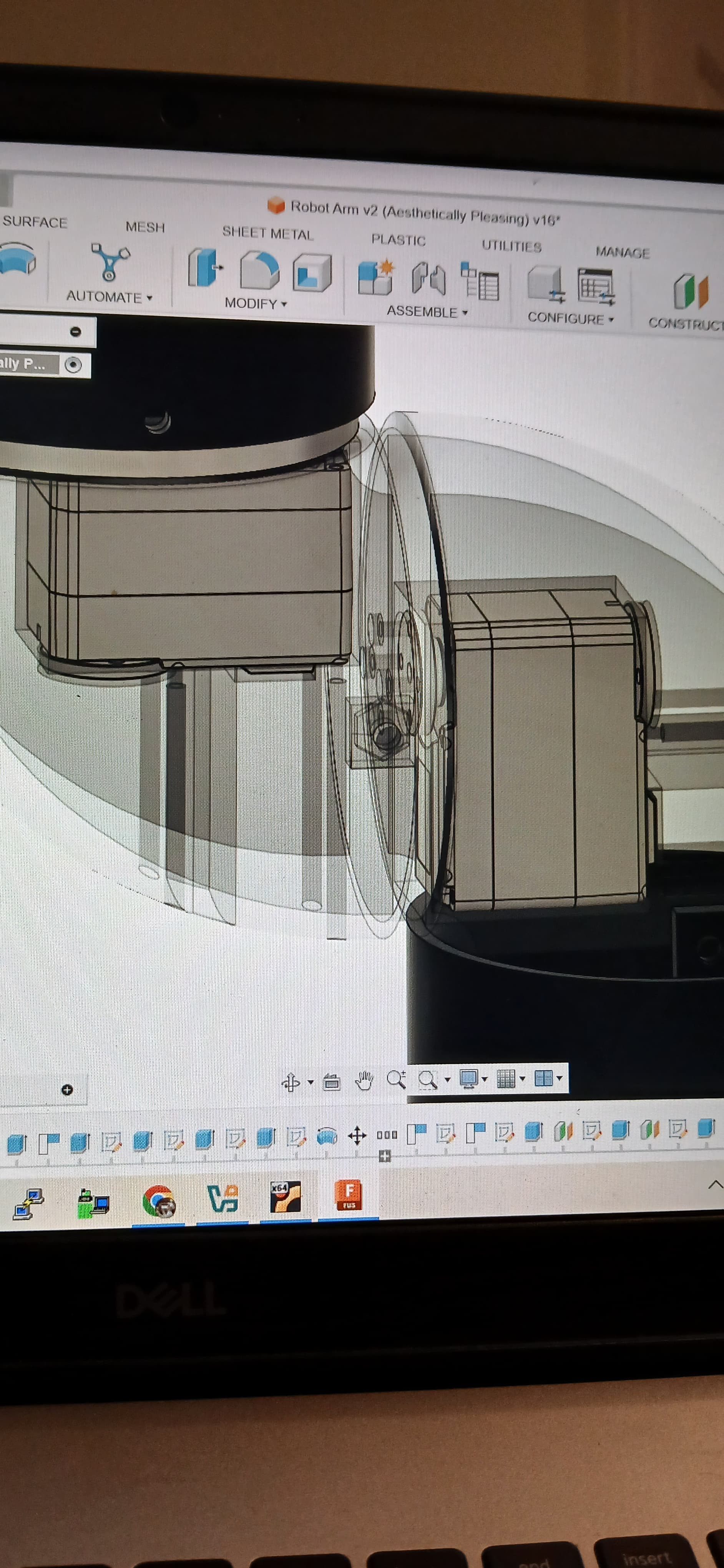
Can you forward us some transparrency mode cad screenshots? If the internal support structure is cantilevered it is practically guaranteed to sag.

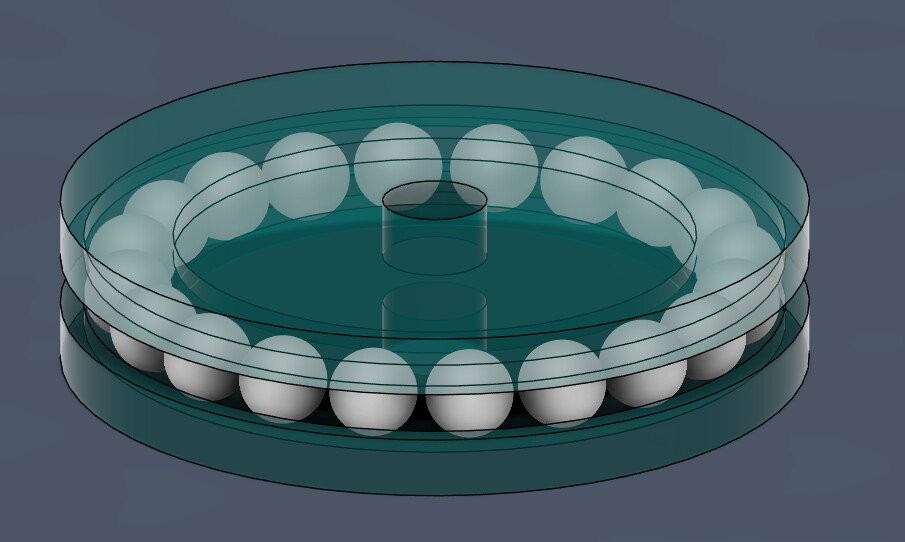
I recommend using a thrust bearing for projects like this. On my recent robot arm—3D printed and driven with VEX electronics, gears, and shafts—I implemented a custom thrust bearing. It consisted of two sides with grooves cut out and 6 mm airsoft BBs as rolling elements. This solution was super cheap and worked surprisingly well.
Also, that arm is awesome! I’d really love to build one with a similar design, especially powered by stepper motors instead of VEX motors.
Thrust bearing with the bbs is a great idea, thanks! Glad it isnt too expensive as well, already breaking bank with the servos and custom wiring.
What steppers are you using? I’m new to using electronics / any sort of microcontroller system outside of the vex v5 system, so I’m looking for some well priced powerful stepper motors with an encoder.
Im using st3215 servos, they arent too expensive and have good libraries for python and c++. They are quite strong for hobby projects but you can get stronger motors. The main problem is getting a psu that can supply enough power to run them under whatever y9ur peak conditions are
What is the backlash like?
Also, do you have Discord? I’d like to continue this conversation and maybe collaborate on some designs. I doubt the VEX forum community would appreciate us having an extended, non-vex discussion here.
Sorry, don’t use discord
What about email? (20char)
The mods are NOT letting a response through. The closest to any form of personal contact link getting through I’ve had was a YouTube link to a personal channel.
Yeah im not gonna be sending my email on a public forum