Is there any difference with odometry with a holonomic chassis. Would the tracking wheels also have to be at a 45 degree angle? Whats the best way to go about this?
No it would be better if the tracking wheel(s) are in a standard configuration.
2 Likes
but how would that work for when staffing?
given the tracking wheels aer in the same configuration, the horizontal wheel would do the tracking of strafe movement
4 Likes
The reason it is the same is that odometry is just a sensor system—it tells you what the robot is doing, regardless what you told it to do. It can measure a robot moving in any direction, including sideways, even if the robot’s drive isn’t able to power it in that direction. In practice, this means that the robot’s navigation is more accurate because it can detect when the robot inevitably drifts, etc.
4 Likes
The only difference in coding would be figuring out the target motor speeds based on what direction you want to move. Tracking would be the same.
1 Like
I’d also say in standard drive trains the extra sideways wheel is a convenience but not a necessity. Without any desired motion in that direction there is little motion in the sideways direction. However with an X drive this isn’t the case and sideways wheel becomes necessary.
3 Likes
This is the case for mecanum drives especially, because they are much less susceptible to sideways force. For example 7K used only two encoder wheels to achieve their 96 point programming skills run.
So if you want holonomic and are OK with using mecanums, this is a good solution. ![]()
3 Likes
If you use Omni wheels for the tracking wheels, then yes
1 Like
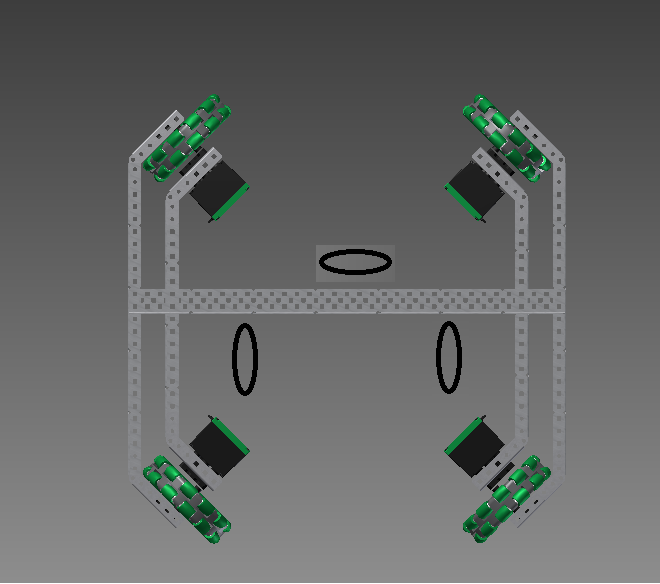
would this configuration of the tracking wheels work with a holonomic drive? (the black ovals being the tracking wheels )
1 Like
Yes, that would be good. You can see the setup used by 5225A (offically #2 in skills this year) here:

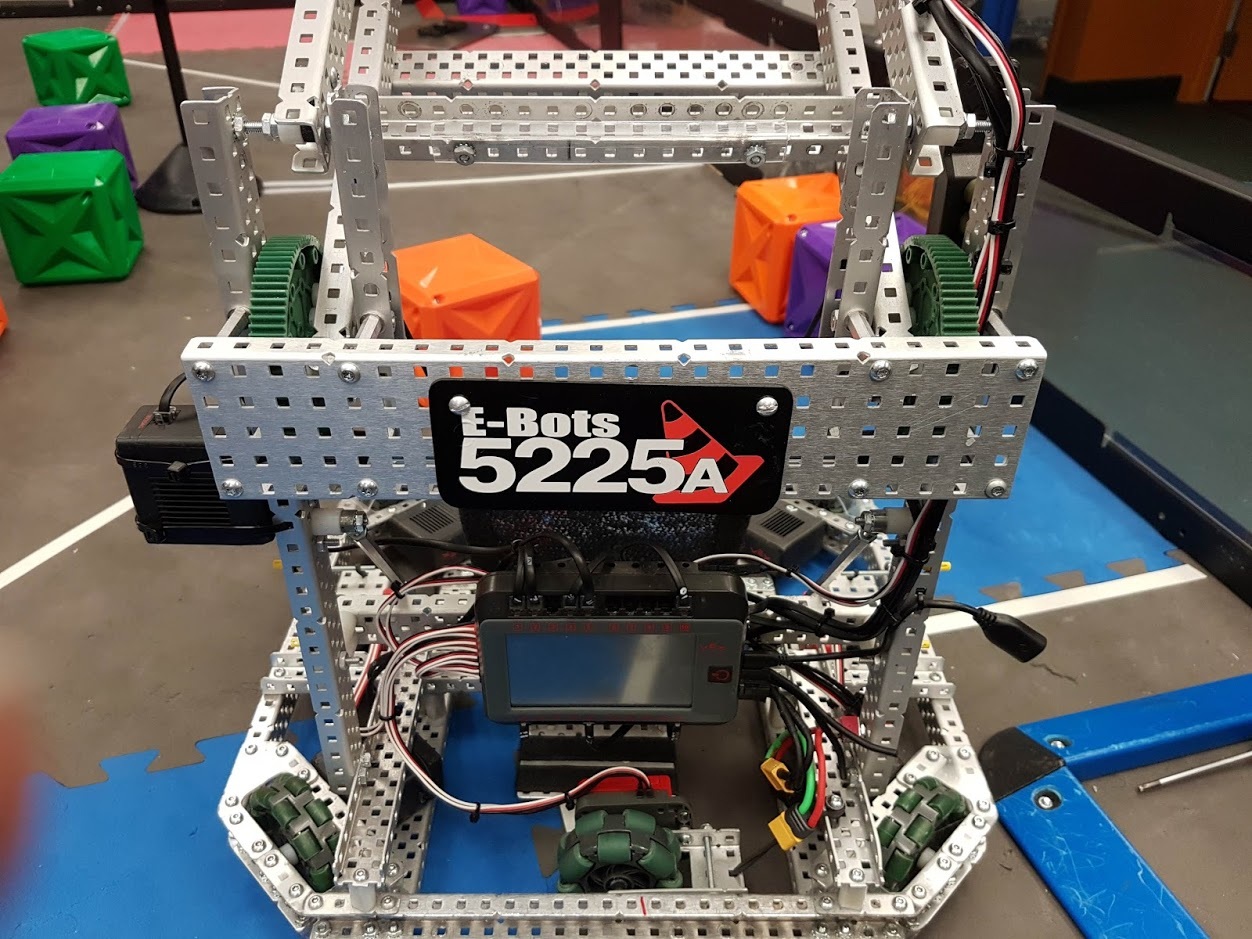
More pictures and videos of that robot are in this album if you’re curious.
4 Likes
thank you!!!
20 char
1 Like
Note that the accuracy of your tracking is increased as the left and right tracking wheels are placed farther apart.
This is due to an increased rotation of the tracking encoders for each arc approximation of the robot. (I believe this is the case, someone please correct me if this is wrong.) ![]()
3 Likes
amazing build quality btw
2 Likes
i believe your reasoning make sense thank you
1 Like